ROS2-Z01-ROS2工具:坐标变换(EXEC1)乌龟跟随案例实战
简介
本章节主要介绍如何实现 “乌龟跟随” 案例。
案例需求&分析
需求: 编写程序实现,程序运行后会启动 turtlesim_node 节点,该节点会生成一个窗口,窗口中有一只原生乌龟(turtle1),紧接着再生成一只新的乌龟(turtle2)。要求在 turtle1 无论是静止或是被键盘控制运动时,turtle2 都会以 turtle1 为目标并向其几何中心运动。
分析: “乌龟跟随” 案例的核心是如何确定 turtle1 相对 turtle2 的位置,只要该位置确定就可以把其作为目标点并控制 turtle2 向其运动。相对位置的确定可以通过坐标变换实现,大致思路是先分别广播 turtle1 相对于 world 和 turtle2 相对于 world 的坐标系关系,然后再通过监听坐标系关系进一步获取 turtle1 相对于 turtle2 的坐标系关系。
流程简介
案例实现主要步骤如下:
- 编写程序调用
/spawn服务生成一只新乌龟; - 编写坐标变换广播实现,通过该实现可以广播
turtle1相对于world和turtle2相对于world的坐标系关系; - 编写坐标变换监听实现,获取
turtle1相对于turtle2的坐标系关系并生成控制turtle2运动的速度指令; - 编写
launch文件集成相关节点; - 编辑配置文件;
- 编译;
- 执行。
案例我们会采用 C++ 和 Python 分别实现,二者都遵循上述实现流程。
准备工作
1.新建功能包
终端下进入工作空间的src目录,调用如下两条命令分别创建C++功能包和Python功能包。
ros2 pkg create cpp05_exercise --build-type ament_cmake --dependencies rclcpp tf2 tf2_ros geometry_msgs turtlesim
ros2 pkg create py05_exercise --build-type ament_python --dependencies rclpy tf_transformations tf2_ros geometry_msgs turtlesim2.创建launch目录
功能包 cpp05_exercise 和 py05_exercise 下分别新建 launch 文件,并编辑配置文件。
在功能包 cpp05_exercise 的 CMakeLists.txt 文件内添加如下内容:
...
install(DIRECTORY launch
DESTINATION share/${PROJECT_NAME}
)在功能包 py05_exercise 的 setup.py 文件中,需要修改 data_files 属性,修改后的内容如下:
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml'],),
('share/' + package_name, glob("launch/*.launch.xml")),
('share/' + package_name, glob("launch/*.launch.py")),
('share/' + package_name, glob("launch/*.launch.yaml")),
],案例实现
1. 编写程序调用 /spawn 服务生成一只新乌龟
功能包 cpp05_exercise 的 src 目录下,新建 C++ 文件 execr01_spawn.cpp,并编辑文件,输入如下内容:
/*
需求: 编写客户端实现,发送请求,生成一直新的乌龟
步骤:
1. 包含头文件;
2. 初始化 ROS2 客户端
3. 自定义节点类:
3-1. 使用参数服务,声明新的乌龟信息;
3-2. 创建服务客户端;
3-3. 连接服务端;
3-4. 组织并发送数据;
4. 创建自定义节点类对象,组织函数,处理响应结果
5. 释放资源。
*/
// 1. 包含头文件;
#include "rclcpp/rclcpp.hpp"
#include "turtlesim/srv/spawn.hpp"
using namespace std::chrono_literals;
// 3. 自定义节点类:
class Exer01Spawn: public rclcpp::Node{
public:
Exer01Spawn() : Node("exer01_spawn_node_cpp"){
// 3-1. 使用参数服务,声明新的乌龟信息;
this->declare_parameter("x", 3.0);
this->declare_parameter("y", 3.0);
this->declare_parameter("theta", 0.0);
this->declare_parameter("turtle_name", "turtle2");
x = this->get_parameter("x").as_double();
y = this->get_parameter("y").as_double();
theta = this->get_parameter("theta").as_double();
turtle_name = this->get_parameter("turtle_name").as_string();
// 3-2. 创建服务客户端;
spawn_client_ = this->create_client<turtlesim::srv::Spawn>("/spawn");
}
// 3-3. 连接服务端;
bool connect_server(){
while (!spawn_client_->wait_for_service(2s)){
if (!rclcpp::ok())
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "已强制退出。");
return false;
}
RCLCPP_INFO(this->get_logger(), "服务连接中。。。");
}
return true;
}
// 3-4. 组织并发送数据;
rclcpp::Client<turtlesim::srv::Spawn>::FutureAndRequestId request(){
// rclcpp::Client<turtlesim::srv::Spawn>::FutureAndRequestId
auto req = std::make_shared<turtlesim::srv::Spawn::Request>();
req->x = x;
req->y = y;
req->theta = theta;
req->name = turtle_name;
// async_send_request(std::shared_ptr<turtlesim::srv::Spawn_Request> request)
return spawn_client_->async_send_request(req);
}
private:
double_t x,y,theta;
std::string turtle_name;
rclcpp::Client<turtlesim::srv::Spawn>::SharedPtr spawn_client_;
};
int main(int argc, char *argv[])
{
// 2. 初始化 ROS2 客户端
rclcpp::init(argc, argv);
// 4. 创建自定义节点类对象,组织函数,处理响应结果
auto client_ = std::make_shared<Exer01Spawn>();
bool flag = client_->connect_server();
if (!flag)
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "服务连接失败");
return 1;
}
// 发送请求
auto response = client_->request();
// 处理响应
if (rclcpp::spin_until_future_complete(client_,response) == rclcpp::FutureReturnCode::SUCCESS)
{
RCLCPP_INFO(client_->get_logger(), "响应成功。");
// 判断是否有重名,有重名会返回空,否则为请求的乌龟名称
std::string name = response.get()->name;
if (name.empty()) {
RCLCPP_INFO(client_->get_logger(), "生成的乌龟重名,生成失败!");
} else {
RCLCPP_INFO(client_->get_logger(), "生成成功。");
}
} else {
RCLCPP_INFO(client_->get_logger(), "响应失败。");
}
// 5.释放资源;
rclcpp::shutdown();
return 0;
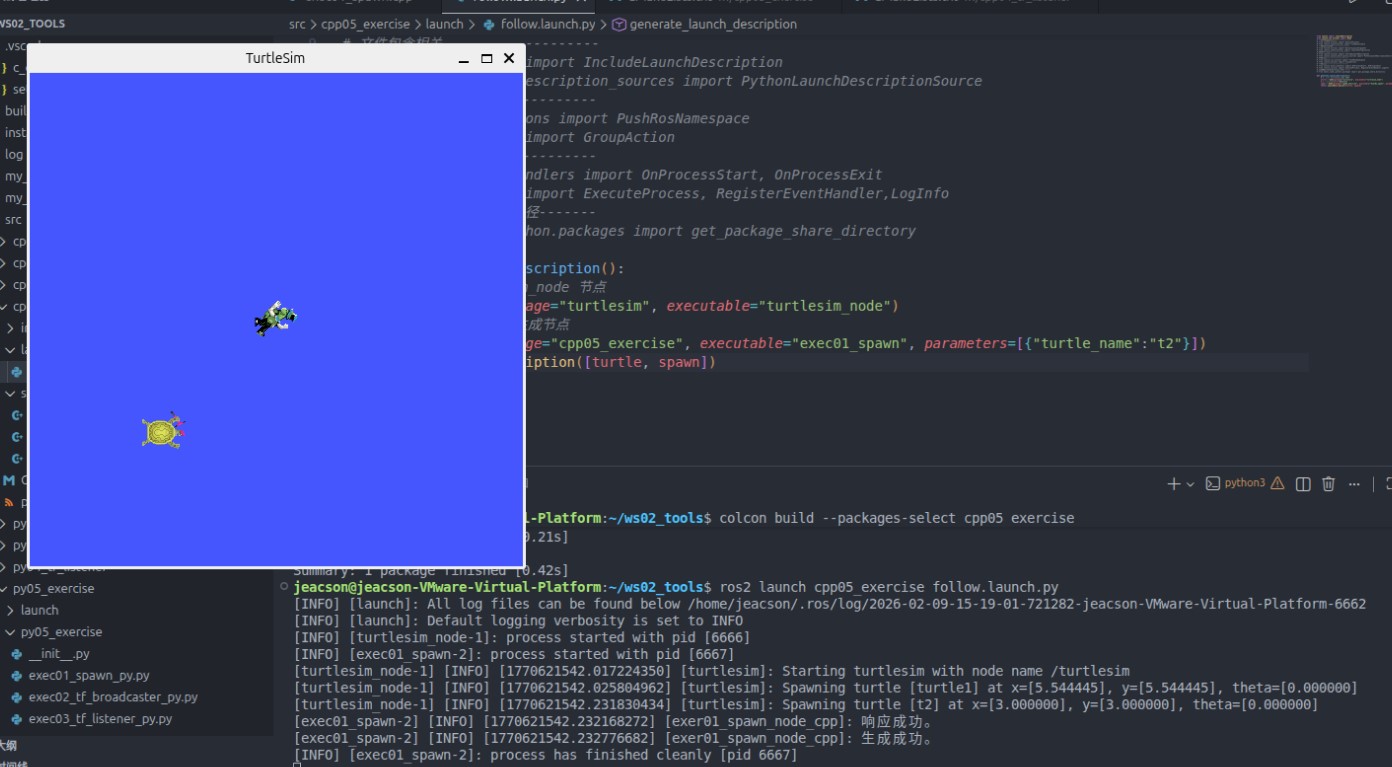
}之后我们着手生成 launch 文件的初步架构。功能包 cpp05_exercise 的 launch 目录下,新建 python 文件 follow.launch.py,并编辑文件,输入如下内容:
from launch import LaunchDescription
from launch_ros.actions import Node
# 封装终端指令相关类--------------
# from launch.actions import ExecuteProcess
# from launch.substitutions import FindExecutable
# 参数声明与获取-----------------
# from launch.actions import DeclareLaunchArgument
# from launch.substitutions import LaunchConfiguration
# 文件包含相关-------------------
# from launch.actions import IncludeLaunchDescription
# from launch.launch_description_sources import PythonLaunchDescriptionSource
# 分组相关----------------------
# from launch_ros.actions import PushRosNamespace
# from launch.actions import GroupAction
# 事件相关----------------------
# from launch.event_handlers import OnProcessStart, OnProcessExit
# from launch.actions import ExecuteProcess, RegisterEventHandler,LogInfo
# 获取功能包下share目录路径-------
# from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
# 1. 启动 turtlesim_node 节点
turtle = Node(package="turtlesim", executable="turtlesim_node")
# 2. 启动自定义乌龟生成节点
spawn = Node(package="cpp05_exercise", executable="exec01_spawn", parameters=[{"turtle_name":"t2"}])
return LaunchDescription([turtle, spawn])使用launch文件进行节点的生成结果如下:
功能包 py05_exercise 的 py05_exercise 目录下,新建 python 文件 exec01_spawn_py.py,并编辑文件,输入如下内容:
"""
需求: 编写客户端实现,发送请求,生成一只新的乌龟
流程:
1.导包;
2.初始化ROS2客户端;
3.自定义节点类;
3-1. 使用参数服务,声明新的乌龟信息;
3-2. 创建服务客户端;
3-3. 连接服务端;
3-4. 组织并发送数据;
4.创建自定义节点类对象,组织函数,处理响应结果
5.资源释放。
"""
# 1.导包;
import rclpy
from rclpy.node import Node
from turtlesim.srv import Spawn
# 3.自定义节点类;
class Exec01SpawnPy(Node):
def __init__(self):
super().__init__("exec_01_spawn_py_node_py")
# 3-1. 使用参数服务,声明新的乌龟信息;
self.declare_parameter("x", 3.0)
self.declare_parameter("y", 3.0)
self.declare_parameter("theta", 1.57)
self.declare_parameter("turtle_name", "turtle2")
self.x = self.get_parameter("x").get_parameter_value().double_value
self.y = self.get_parameter("y").get_parameter_value().double_value
self.theta = self.get_parameter("theta").get_parameter_value().double_value
self.turtle_name = self.get_parameter("turtle_name").get_parameter_value().string_value
# 3-2. 创建服务客户端;
self.client_ = self.create_client(Spawn, "/spawn")
# 3-3. 连接服务端;
while not self.client_.wait_for_service(1.0):
self.get_logger().info("服务连接中。。。")
# 3-4. 组织并发送数据;
def request(self):
# 1. 组织数据
request = Spawn.Request()
request.x = self.x
request.y = self.y
request.theta = self.theta
request.name = self.turtle_name
# 2. 发送数据
self.future = self.client_.call_async(request)
def main():
# 2. 初始化ROS2客户端;
rclpy.init()
# 4. 创建自定义节点类对象,组织函数,处理响应结果
spawn = Exec01SpawnPy()
spawn.request()
rclpy.spin_until_future_complete(spawn, spawn.future)
# 处理响应
response = spawn.future.result()
if len(response.name) == 0:
spawn.get_logger().info("生成的乌龟重名,生成失败!")
else:
spawn.get_logger().info("乌龟生成成功。")
# 5. 资源释放。
rclpy.shutdown()
if __name__ == '__main__':
main()之后我们着手生成 launch 文件的初步架构。功能包 py05_exercise 的 launch 目录下,新建 xml 文件 follow.launch.xml,并编辑文件,输入如下内容:
<launch>
<arg name="t_name" default="t2"/>
<!-- 1. turtlesim_node -->
<node pkg="turtlesim" exec="turtlesim_node"/>
<!-- 2. 自定义的乌龟生成节点 -->
<node pkg="py05_exercise" exec="exec01_spawn_py" name="spawn1">
<param name="x" value="1.0" />
<param name="y" value="3.0" />
<!-- <param name="theta" value="3.0" /> -->
<param name="turtle_name" value="$(var t_name)" />
</node>
</launch>生成乌龟节点时需先判断该乌龟是否重名
有重名会返回空,否则为请求的乌龟名称。

需要判断是否有重名。
2. 编写坐标变换广播实现,通过该实现可以广播 turtle1 相对于 world 和 turtle2 相对于 world 的坐标系关系
/*
需求: 广播不同乌龟相对于 world 的坐标系相对关系。
步骤:
1. 包含头文件;
2. 初始化 ROS2 客户端
3. 自定义节点类:
3-1.创建动态坐标变换广播对象;
3-2.创建一个乌龟位姿订阅方
3-3.回调函数中获取乌龟位姿,生成相对信息并发布。
4. 调用spin函数,并传入节点对象指针
5. 释放资源。
*/
// 1. 包含头文件;
#include <geometry_msgs/msg/transform_stamped.hpp>
#include <turtlesim/msg/pose.hpp>
#include <rclcpp/rclcpp.hpp>
// 四元数转换用的库
#include <tf2/LinearMath/Quaternion.h>
#include <tf2_ros/transform_broadcaster.h>
using std::placeholders::_1;
// 3. 自定义节点类:
class Exec02TFBroadcaster: public rclcpp::Node{
public:
Exec02TFBroadcaster() : Node("exec02_tf_broadcaster_node_cpp"){
// 与之前的 demo02_dynamic_tf_broadcaster 相比
// 将 turtle 变为了动态的数据进行传参
this->declare_parameter("turtle", "turtle1");
turtle = this->get_parameter("turtle").as_string();
// 3-1.创建动态坐标变换广播对象;
tf_broadcaster_ = std::make_shared<tf2_ros::TransformBroadcaster>(this);
// 3-2.创建一个乌龟位姿订阅方
pose_sub_ = this->create_subscription<turtlesim::msg::Pose>("/" + turtle + "/pose", 10,
std::bind(&Exec02TFBroadcaster::do_pose, this, std::placeholders::_1)
);
}
private:
// 3-3.回调函数中获取乌龟位姿,生成相对信息并发布。
void do_pose(const turtlesim::msg::Pose & pose)
{
// 组织消息
geometry_msgs::msg::TransformStamped ts;
ts.header.stamp = this->now();
ts.header.frame_id = "world";
ts.child_frame_id = turtle;
ts.transform.translation.x = pose.x;
ts.transform.translation.y = pose.y;
ts.transform.translation.z = 0.0;
// 从欧拉角转换出四元数
// 但是作为 2D 乌龟,只有 yaw,没有 pitch 和 row (定为0)
tf2::Quaternion q;
q.setRPY(0, 0, pose.theta);
ts.transform.rotation.x = q.x();
ts.transform.rotation.y = q.y();
ts.transform.rotation.z = q.z();
ts.transform.rotation.w = q.w();
// 发布消息
tf_broadcaster_->sendTransform(ts);
// RCLCPP_INFO(get_logger(), "已成功发布广播!");
}
std::string turtle;
std::shared_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster_;
rclcpp::Subscription<turtlesim::msg::Pose>::SharedPtr pose_sub_;
};
int main(int argc, char *argv[])
{
// 2. 初始化 ROS2 客户端
rclcpp::init(argc, argv);
// 4. 调用spin函数,并传入节点对象指针。
rclcpp::spin(std::make_shared<Exec02TFBroadcaster>());
// 5.释放资源;
rclcpp::shutdown();
return 0;
}之后我们继续完善 launch 文件的相关架构。在功能包 cpp05_exercise 的 launch 目录下,编辑python 文件 follow.launch.py,输入如下内容:
from launch import LaunchDescription
from launch_ros.actions import Node
# 封装终端指令相关类--------------
# from launch.actions import ExecuteProcess
# from launch.substitutions import FindExecutable
# 参数声明与获取-----------------
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
# 文件包含相关-------------------
# from launch.actions import IncludeLaunchDescription
# from launch.launch_description_sources import PythonLaunchDescriptionSource
# 分组相关----------------------
# from launch_ros.actions import PushRosNamespace
# from launch.actions import GroupAction
# 事件相关----------------------
# from launch.event_handlers import OnProcessStart, OnProcessExit
# from launch.actions import ExecuteProcess, RegisterEventHandler,LogInfo
# 获取功能包下share目录路径-------
# from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
t2 = DeclareLaunchArgument(name="t2_name", default_value="t2") # 👈NEW!!
# 1. 启动 turtlesim_node 节点
turtle = Node(package="turtlesim", executable="turtlesim_node")
# 2. 启动自定义乌龟生成节点
spawn = Node(package="cpp05_exercise", executable="exec01_spawn", parameters=[{"turtle_name":LaunchConfiguration("t2_name")}]) # 👈NEW!!
# 3. 分别广播两只乌龟相对于 world 的坐标变换 👈NEW!!
broadcaster1 = Node(package="cpp05_exercise", executable="exec02_tf_broadcaster", name="broa1")
broadcaster2 = Node(package="cpp05_exercise", executable="exec02_tf_broadcaster", name="broa2", parameters=[{"turtle": LaunchConfiguration("t2_name")}])
return LaunchDescription([t2, turtle, spawn, broadcaster1, broadcaster2])功能包 py05_exercise 的 py05_exercise 目录下,新建 python 文件 exec02_tf_broadcaster_py.py,并编辑文件,输入如下内容:
"""
需求: 广播不同乌龟相对于 world 的坐标系相对关系。
流程:
1.导包;
2.初始化ROS2客户端;
3.自定义节点类;
3-1.创建动态坐标变换广播对象;
3-2.创建一个乌龟位姿订阅方
3-3.回调函数中获取乌龟位姿,生成相对信息并发布。
4.调用spin函数,并传入节点对象;
5.资源释放。
"""
# 1.导包;
import rclpy
from rclpy.node import Node
from tf2_ros import TransformBroadcaster
from turtlesim.msg import Pose
from geometry_msgs.msg import TransformStamped
import tf_transformations
# 3.自定义节点类;
class Exec02TFBroadcasterPy(Node):
def __init__(self):
super().__init__("exec02_tf_broadcaster_py_node_py")
# 与之前的 demo02_dynamic_tf_broadcaster 相比
# 将 turtle 变为了动态的数据进行传参
self.declare_parameter("turtle", "turtle1")
self.turtle1 = self.get_parameter("turtle").get_parameter_value().string_value
# 3-1.创建动态坐标变换广播对象
self.broadcaster = TransformBroadcaster(self)
# 3-2.创建一个乌龟位姿订阅方
self.sub = self.create_subscription(
Pose, "/" + self.turtle1 + "/pose", self.do_pose, 10
)
# 3-3.回调函数中获取乌龟位姿,生成相对信息并发布。
def do_pose(self, pose):
ts = TransformStamped()
# 组织消息
ts.header.stamp = self.get_clock().now().to_msg()
ts.header.frame_id = "world"
ts.child_frame_id = self.turtle1
# 设置偏移量
ts.transform.translation.x = pose.x;
ts.transform.translation.y = pose.y;
ts.transform.translation.z = 0.0;
# 设置四元数
q = tf_transformations.quaternion_from_euler(0.0, 0.0, pose.theta)
ts.transform.rotation.x = q[0]
ts.transform.rotation.y = q[1]
ts.transform.rotation.z = q[2]
ts.transform.rotation.w = q[3]
# 发布消息
self.broadcaster.sendTransform(ts)
# self.get_logger().info("正在发布广播中。。。")
def main():
# 2.初始化ROS2客户端;
rclpy.init()
# 4.调用spin函数,并传入节点对象;
rclpy.spin(Exec02TFBroadcasterPy())
# 5.资源释放。
rclpy.shutdown()
if __name__ == '__main__':
main()之后我们继续完善 launch 文件的相关架构。在功能包 py05_exercise 的 launch 目录下,编辑xml 文件 follow.launch.xml,添加如下内容:
<launch>
<arg name="t_name" default="t2"/>
<!-- 1. turtlesim_node -->
<node pkg="turtlesim" exec="turtlesim_node"/>
<!-- 2. 自定义的乌龟生成节点 -->
<node pkg="py05_exercise" exec="exec01_spawn_py" name="spawn1">
<param name="x" value="1.0" />
<param name="y" value="3.0" />
<!-- <param name="theta" value="3.0" /> -->
<param name="turtle_name" value="$(var t_name)" />
</node>
<!-- 3. 广播两只乌龟的坐标变换 -->
<node pkg="py05_exercise" exec="exec02_tf_broadcaster_py" name="bro1"/>
<node pkg="py05_exercise" exec="exec02_tf_broadcaster_py" name="bro2">
<param name="turtle" value="$(var t_name)"/>
</node>
</launch>3. 编写坐标变换监听实现,获取 turtle1 相对于 turtle2 的坐标系关系并生成控制 turtle2 运动的速度指令
功能包 cpp05_exercise 的 src 目录下,新建 C++ 文件 exec03_tf_listener.cpp,并编辑文件,输入如下内容:
/*
需求: 监听坐标变换广播数据,并生成 turtle1 相对于 t2 的 坐标数据。
之后依据该坐标数据生成控制 t2 运动的速度指令
步骤:
1. 包含头文件;
2. 初始化 ROS2 客户端
3. 自定义节点类:
3-1. 声明参数服务
3-2. 创建缓存
3-3. 创建监听器
3-4. 创建速度发布方
3-5. 创建定时器,在其内部实现坐标变换。生成速度指令并发布
4. 调用spin函数,并传入节点对象指针
5. 释放资源。
*/
// 1. 包含头文件;
#include "rclcpp/rclcpp.hpp"
#include "tf2_ros/buffer.h"
#include "tf2_ros/transform_listener.hpp"
#include "geometry_msgs/msg/twist.hpp"
using namespace std::chrono_literals;
// 3. 自定义节点类:
class Exec03TFListener: public rclcpp::Node{
public:
Exec03TFListener() : Node("exec03_tf_listener_node_cpp"){
// 3-1. 声明参数服务
this->declare_parameter("father_frame", "t2");
this->declare_parameter("child_frame", "turtle1");
father_frame = this->get_parameter("father_frame").as_string();
child_frame = this->get_parameter("child_frame").as_string();
// 3-2. 创建缓存
buffer_ = std::make_shared<tf2_ros::Buffer>(this->get_clock());
// 3-3. 创建监听器
listener_ = std::make_shared<tf2_ros::TransformListener>(*buffer_);
// 3-4. 创建速度发布方
cmd_pub_ = this->create_publisher<geometry_msgs::msg::Twist>("/" + father_frame + "/cmd_vel",10);
// 3-5. 创建定时器,在其内部实现坐标变换。生成速度指令并发布
timer_ = this->create_wall_timer(1s, std::bind(&Exec03TFListener::on_timer, this));
}
private:
void on_timer(){
// 1. 实现坐标变换
try
{
auto ts = buffer_->lookupTransform(father_frame, child_frame, tf2::TimePointZero);
geometry_msgs::msg::Twist twist;
// 2. 组织并发布速度指令
// 2-1. 明确设置字段
// 线速度 x 与角速度 z
// 2-2. 确认线速度角速度的计算规则
// ts 中包含两个坐标系的 x 距离与 y 距离
// 线速度 = 系数 * sqrt(x^2 + y^2)
// 角速度 = 系数 * 反正切(y/x)
twist.linear.x = 0.5 * sqrt(pow(ts.transform.translation.x,2) + pow(ts.transform.translation.y,2));
twist.angular.z = 1.0 * atan2(ts.transform.translation.y, ts.transform.translation.x);
cmd_pub_->publish(twist);
}
catch(const tf2::LookupException& e)
{
RCLCPP_INFO(this->get_logger(), "异常提示:%s", e.what());
}
}
std::string father_frame;
std::string child_frame;
std::shared_ptr<tf2_ros::Buffer> buffer_;
std::shared_ptr<tf2_ros::TransformListener> listener_;
rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr cmd_pub_;
rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc, char *argv[])
{
// 2. 初始化 ROS2 客户端
rclcpp::init(argc, argv);
// 4. 调用spin函数,并传入节点对象指针。
rclcpp::spin(std::make_shared<Exec03TFListener>());
// 5.释放资源;
rclcpp::shutdown();
return 0;
}之后我们继续完善 launch 文件的相关架构。在功能包 cpp05_exercise 的 launch 目录下,编辑python 文件 follow.launch.py,输入如下内容:
from launch import LaunchDescription
from launch_ros.actions import Node
# 封装终端指令相关类--------------
# from launch.actions import ExecuteProcess
# from launch.substitutions import FindExecutable
# 参数声明与获取-----------------
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
# 文件包含相关-------------------
# from launch.actions import IncludeLaunchDescription
# from launch.launch_description_sources import PythonLaunchDescriptionSource
# 分组相关----------------------
# from launch_ros.actions import PushRosNamespace
# from launch.actions import GroupAction
# 事件相关----------------------
# from launch.event_handlers import OnProcessStart, OnProcessExit
# from launch.actions import ExecuteProcess, RegisterEventHandler,LogInfo
# 获取功能包下share目录路径-------
# from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
t2 = DeclareLaunchArgument(name="t2_name", default_value="t2")
# 1. 启动 turtlesim_node 节点
turtle = Node(package="turtlesim", executable="turtlesim_node")
# 2. 启动自定义乌龟生成节点
spawn = Node(package="cpp05_exercise", executable="exec01_spawn", parameters=[{"turtle_name":LaunchConfiguration("t2_name")}])
# 3. 分别广播两只乌龟相对于 world 的坐标变换
broadcaster1 = Node(package="cpp05_exercise", executable="exec02_tf_broadcaster", name="broa1")
broadcaster2 = Node(package="cpp05_exercise", executable="exec02_tf_broadcaster", name="broa2", parameters=[{"turtle": LaunchConfiguration("t2_name")}])
# 4. 创建监听节点
listener = Node(package="cpp05_exercise", executable="exec03_tf_listener", parameters=[{"father_frame": LaunchConfiguration("t2_name"), "child_frame": "turtle1"}])
return LaunchDescription([t2, turtle, spawn, broadcaster1, broadcaster2, listener])功能包 py05_exercise 的 py05_exercise 目录下,新建 python 文件 exec03_tf_listener_py.py,并编辑文件,输入如下内容:
"""
需求: 监听坐标变换广播数据,并生成 turtle1 相对于 t2 的 坐标数据。
之后依据该坐标数据生成控制 t2 运动的速度指令
流程:
1.导包;
2.初始化ROS2客户端;
3.自定义节点类;
4.调用spin函数,并传入节点对象;
5.资源释放。
"""
# 1.导包;
import rclpy
from rclpy.node import Node
from tf2_ros import Buffer, TransformListener
# from tf2_ros.buffer import Buffer
# from tf2_ros.transform_listener import TransformListener
from geometry_msgs.msg import Twist
from rclpy.time import Time
import math
# 3.自定义节点类;
class Exec03TFListenerPy(Node):
def __init__(self):
super().__init__("exec03_tf_listener_py_node_py")
# 1. 声明参数服务
self.declare_parameter("father_frame", "t2")
self.declare_parameter("child_frame", "turtle1")
self.father_frame = self.get_parameter("father_frame").get_parameter_value().string_value
self.child_frame = self.get_parameter("child_frame").get_parameter_value().string_value
# 2. 创建缓存
self.buffer_ = Buffer()
# 3. 创建监听器
self.listener_ = TransformListener(self.buffer_, self)
# 4. 创建速度发布方
self.cmd_pub_ = self.create_publisher(Twist,"/" + self.father_frame + "/cmd_vel", 10)
# 创建定时器,在其内部实现坐标变换。生成速度指令并发布
self.timer_ = self.create_timer(1.0, self.on_timer)
def on_timer(self):
# 1. 实现坐标变换
# 判断是否可以进行坐标系转换
if self.buffer_.can_transform(self.father_frame, self.child_frame, Time()):
ts = self.buffer_.lookup_transform(self.father_frame, self.child_frame, Time())
twist = Twist()
twist.linear.x = 0.5 * math.sqrt(math.pow(ts.transform.translation.x,2) + math.pow(ts.transform.translation.y,2))
twist.angular.z = 1.0 * math.atan2(ts.transform.translation.y, ts.transform.translation.x)
# 3. 发布
self.cmd_pub_.publish(twist)
def main():
# 2.初始化ROS2客户端;
rclpy.init()
# 4.调用spin函数,并传入节点对象;
rclpy.spin(Exec03TFListenerPy())
# 5.资源释放。
rclpy.shutdown()
if __name__ == '__main__':
main()之后我们继续完善 launch 文件的相关架构。在功能包 py05_exercise 的 launch 目录下,编辑xml 文件 follow.launch.xml,输入如下内容:
<launch>
<arg name="t_name" default="t2"/>
<!-- 1. turtlesim_node -->
<node pkg="turtlesim" exec="turtlesim_node"/>
<!-- 2. 自定义的乌龟生成节点 -->
<node pkg="py05_exercise" exec="exec01_spawn_py" name="spawn1">
<param name="x" value="1.0" />
<param name="y" value="3.0" />
<!-- <param name="theta" value="3.0" /> -->
<param name="turtle_name" value="$(var t_name)" />
</node>
<!-- 3. 广播两只乌龟的坐标变换 -->
<node pkg="py05_exercise" exec="exec02_tf_broadcaster_py" name="bro1"/>
<node pkg="py05_exercise" exec="exec02_tf_broadcaster_py" name="bro2">
<param name="turtle" value="$(var t_name)"/>
</node>
<!-- 4. 创建监听节点 -->
<node pkg="py05_exercise" exec="exec03_tf_listener_py">
<param name="father_frame" value="$(var t_name)"/>
<param name="child_frame" value="turtle1"/>
</node>
</launch>4. 编写 launch 文件集成相关节点
如前文步骤所述,相关 launch 文件如下:
from launch import LaunchDescription
from launch_ros.actions import Node
# 封装终端指令相关类--------------
# from launch.actions import ExecuteProcess
# from launch.substitutions import FindExecutable
# 参数声明与获取-----------------
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
# 文件包含相关-------------------
# from launch.actions import IncludeLaunchDescription
# from launch.launch_description_sources import PythonLaunchDescriptionSource
# 分组相关----------------------
# from launch_ros.actions import PushRosNamespace
# from launch.actions import GroupAction
# 事件相关----------------------
# from launch.event_handlers import OnProcessStart, OnProcessExit
# from launch.actions import ExecuteProcess, RegisterEventHandler,LogInfo
# 获取功能包下share目录路径-------
# from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
t2 = DeclareLaunchArgument(name="t2_name", default_value="t2")
# 1. 启动 turtlesim_node 节点
turtle = Node(package="turtlesim", executable="turtlesim_node")
# 2. 启动自定义乌龟生成节点
spawn = Node(package="cpp05_exercise", executable="exec01_spawn", parameters=[{"turtle_name":LaunchConfiguration("t2_name")}])
# 3. 分别广播两只乌龟相对于 world 的坐标变换
broadcaster1 = Node(package="cpp05_exercise", executable="exec02_tf_broadcaster", name="broa1")
broadcaster2 = Node(package="cpp05_exercise", executable="exec02_tf_broadcaster", name="broa2", parameters=[{"turtle": LaunchConfiguration("t2_name")}])
# 4. 创建监听节点
listener = Node(package="cpp05_exercise", executable="exec03_tf_listener", parameters=[{"father_frame": LaunchConfiguration("t2_name"), "child_frame": "turtle1"}])
return LaunchDescription([t2, turtle, spawn, broadcaster1, broadcaster2, listener])如前文步骤所述,相关 xml 文件如下:
<launch>
<arg name="t_name" default="t2"/>
<!-- 1. turtlesim_node -->
<node pkg="turtlesim" exec="turtlesim_node"/>
<!-- 2. 自定义的乌龟生成节点 -->
<node pkg="py05_exercise" exec="exec01_spawn_py" name="spawn1">
<param name="x" value="1.0" />
<param name="y" value="3.0" />
<!-- <param name="theta" value="3.0" /> -->
<param name="turtle_name" value="$(var t_name)" />
</node>
<!-- 3. 广播两只乌龟的坐标变换 -->
<node pkg="py05_exercise" exec="exec02_tf_broadcaster_py" name="bro1"/>
<node pkg="py05_exercise" exec="exec02_tf_broadcaster_py" name="bro2">
<param name="turtle" value="$(var t_name)"/>
</node>
<!-- 4. 创建监听节点 -->
<node pkg="py05_exercise" exec="exec03_tf_listener_py">
<param name="father_frame" value="$(var t_name)"/>
<param name="child_frame" value="turtle1"/>
</node>
</launch>5. 编辑配置文件
CMakeLists.txt 配置如下:
cmake_minimum_required(VERSION 3.8)
project(cpp05_exercise)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tf2 REQUIRED)
find_package(tf2_ros REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(turtlesim REQUIRED)
add_executable(exec01_spawn src/exec01_spawn.cpp)
add_executable(exec02_tf_broadcaster src/exec02_tf_broadcaster.cpp)
add_executable(exec03_tf_listener src/exec03_tf_listener.cpp)
target_include_directories(exec01_spawn PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include/${PROJECT_NAME}>)
target_include_directories(exec02_tf_broadcaster PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include/${PROJECT_NAME}>)
target_include_directories(exec03_tf_listener PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include/${PROJECT_NAME}>)
target_compile_features(exec01_spawn PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17
target_compile_features(exec02_tf_broadcaster PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17
target_compile_features(exec03_tf_listener PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17
ament_target_dependencies(
exec01_spawn
"rclcpp"
"tf2"
"tf2_ros"
"geometry_msgs"
"turtlesim"
)
ament_target_dependencies(
exec02_tf_broadcaster
"rclcpp"
"tf2"
"tf2_ros"
"geometry_msgs"
"turtlesim"
)
ament_target_dependencies(
exec03_tf_listener
"rclcpp"
"tf2"
"tf2_ros"
"geometry_msgs"
)
install(TARGETS exec01_spawn exec02_tf_broadcaster exec03_tf_listener
DESTINATION lib/${PROJECT_NAME}
)
# NEW
install(DIRECTORY launch
DESTINATION share/${PROJECT_NAME}
)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()package.xml 配置如下:
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>cpp05_exercise</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="[email protected]">jeacson</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rclcpp</depend>
<depend>tf2</depend>
<depend>tf2_ros</depend>
<depend>geometry_msgs</depend>
<depend>turtlesim</depend>
<!-- NEW -->
<exec_depend>ros2launch</exec_depend>
<!-- NEW -->
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>setup.py 配置如下:
from glob import glob
from setuptools import find_packages, setup
package_name = 'py05_exercise'
setup(
name=package_name,
version='0.0.0',
packages=find_packages(exclude=['test']),
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
# NEW
('share/' + package_name, glob("launch/*.launch.xml")),
('share/' + package_name, glob("launch/*.launch.py")),
('share/' + package_name, glob("launch/*.launch.yaml")),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='jeacson',
maintainer_email='[email protected]',
description='TODO: Package description',
license='TODO: License declaration',
extras_require={
'test': [
'pytest',
],
},
entry_points={
'console_scripts': [
'exec01_spawn_py = py05_exercise.exec01_spawn_py:main',
'exec02_tf_broadcaster_py = py05_exercise.exec02_tf_broadcaster_py:main',
'exec03_tf_listener_py = py05_exercise.exec03_tf_listener_py:main',
],
},
)package.xml 配置如下:
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>py05_exercise</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="[email protected]">jeacson</maintainer>
<license>TODO: License declaration</license>
<depend>rclpy</depend>
<depend>tf_transformations</depend>
<depend>tf2_ros</depend>
<depend>geometry_msgs</depend>
<depend>turtlesim</depend>
<test_depend>ament_copyright</test_depend>
<test_depend>ament_flake8</test_depend>
<test_depend>ament_pep257</test_depend>
<test_depend>python3-pytest</test_depend>
<export>
<build_type>ament_python</build_type>
</export>
</package>6. 编译
colcon build --packages-select cpp05_exercisecolcon build --packages-select py05_exercise7. 执行
当前工作空间下启动终端,输入如下命令运行launch文件:
. install/setup.bash
ros2 launch cpp05_exercise follow.launch.py. install/setup.bash
ros2 launch py05_exercise follow.launch.xml再另外新建一终端,启动 turtlesim 键盘控制节点:
ros2 run turtlesim turtle_teleop_key该终端下可以通过键盘控制 turtle1 运动,并且 turtle2 会跟随 turtle1 运动。最终的运行结果如下: