ROS2-026-ROS2工具:坐标变换(七)坐标变换工具
简介
在 TF 框架中,ROS2 除了封装了 坐标广播与监听 功能外,还提供了一些可以帮助我们提高开发、调试效率的工具。本章节主要介绍这些工具的使用。
这些工具主要涉及到两个功能包:tf2_ros 和 tf2_tools。
功能包介绍
tf2_ros 包中提供的常用节点如下:
static_transform_publisher:该节点用于广播静态坐标变换,在 ROS2-022-ROS2工具:坐标变换(三)坐标变换广播 章节中已有详细说明,不再介绍;tf2_monitor:该节点用于打印所有或特定坐标系的发布频率与网络延迟;tf2_echo:该节点用于打印特定坐标系的平移旋转关系。
tf2_tools 包中提供的节点如下:
view_frames:该节点可以生成显示坐标系关系的 pdf 文件,该文件包含树形结构的坐标系图谱。
准备工作
首先启动多个坐标系广播节点。这里以 坐标变换(三)坐标变换广播 章节中的静态变换以及动态变换为例:
静态变换
在工作空间下启动两个终端A&B,终端A 输入如下命令:
. install/setup.bash
ros2 run tf2_ros static_transform_publisher --frame-id base_link --child-frame-id laser --x 1.0 --y 0.0 --z 0.2终端B 输入如下命令:
. install/setup.bash
ros2 run tf2_ros static_transform_publisher --frame-id base_link --child-frame-id camera --x -0.5 --y 0.0 --z 0.4动态变换
在工作空间下启动两个终端 C&D,终端C 输入如下命令:
. install/setup.bash
ros2 run turtlesim turtlesim_node终端D 输入如下命令:
. install/setup.bash
ros2 run cpp03_tf_broadcaster demo02_dynamic_tf_broadcaster另开一个新终端E,在终端E中输入如下命令:
. install/setup.bash
ros2 run turtlesim turtle_teleop_key整体操作会类似于:

工具常用节点示例
另开一个新终端F,用于输入新指令。
Ⅰ.tf2_monitor
该节点用于打印在规定时间(默认为十秒钟的组测时间)内 坐标系的发布频率与网络延迟。
在终端F中输入如下命令:
ros2 run tf2_ros tf2_monitor在终端中你可以看到如下输出:
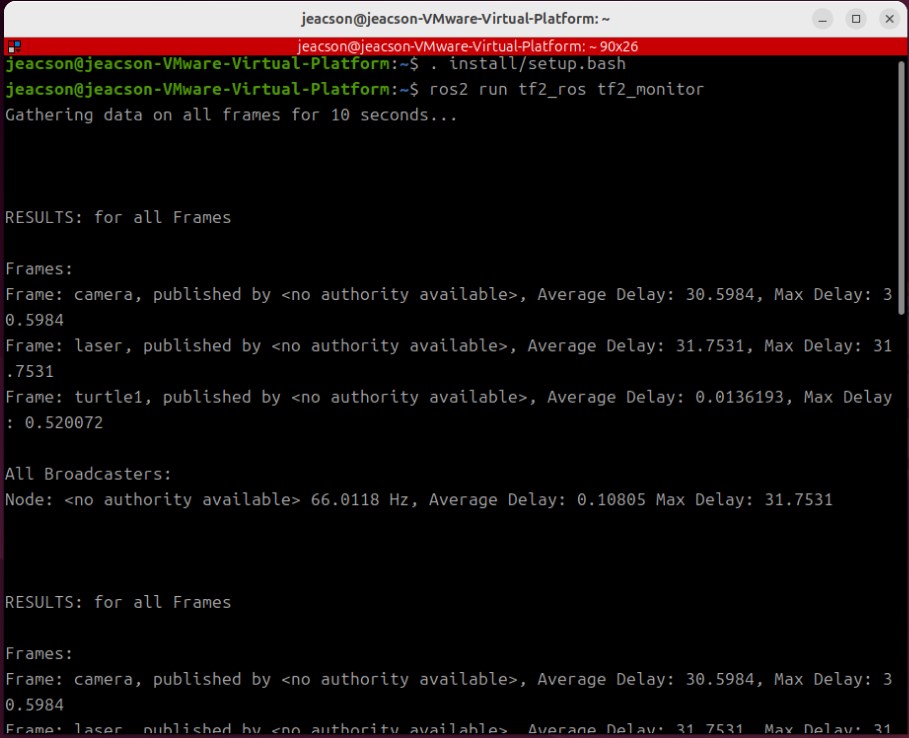
其打印了在规定时间内 所有 坐标系的发布频率与网络延迟。
你也可以在终端F中输入如下命令:
ros2 run tf2_ros tf2_monitor camera base_link以查看 camera 坐标系相对于 base_link 坐标系的发布频率与网络延迟。

前面的几次异常抛出是还没从缓存中找到指定坐标系所引起,是正常现象
Ⅱ.tf2_echo
该节点用于打印两个特定坐标系之间的相对位姿关系。
在终端F中输入如下命令:
ros2 run tf2_ros tf2_echo world turtle1就可以打印 world 与 turtle1 两个特定坐标系之间的相对位姿关系。

其默认的输出间隔为1s左右:
Ⅲ.view_frames
该节点可以以图形化的方式显示坐标系关系。
在终端F中输入如下命令:
ros2 run tf2_tools view_frames该节点会在开启后,通过订阅 /tf 和 /tf_static 话题 5秒,监听并记录在 该时段内 所有 发布的坐标变换数据以及每个坐标系之间的父子关系。
之后会在该终端所在的当前目录下生成多个文件:
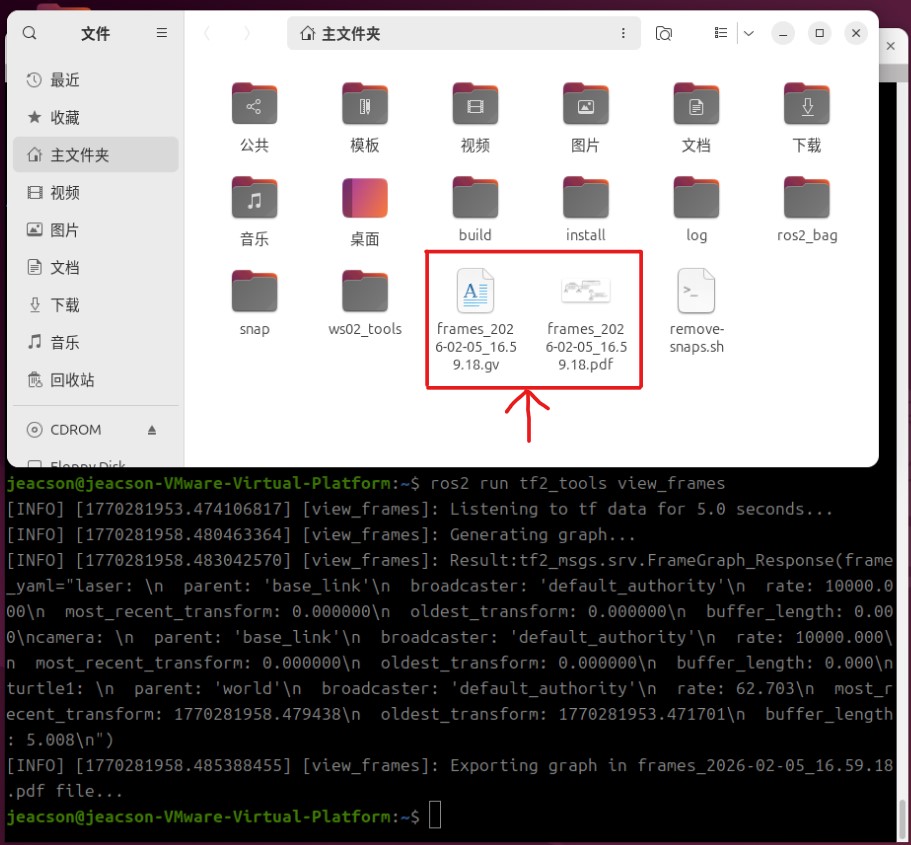
这两个文件的相关说明如下:
| 文件扩展名 | 相关说明 |
|---|---|
.gv | Graphviz DOT 格式的文本文件,描述图结构,可以理解为是下面的 .pdf 文件的一个描述文件 |
.pdf | 渲染好的 PDF 图表,显示 TF 树的层次结构,该文件为主要查看用的文件 |
该 .pdf 在开启后会呈现以下内容:
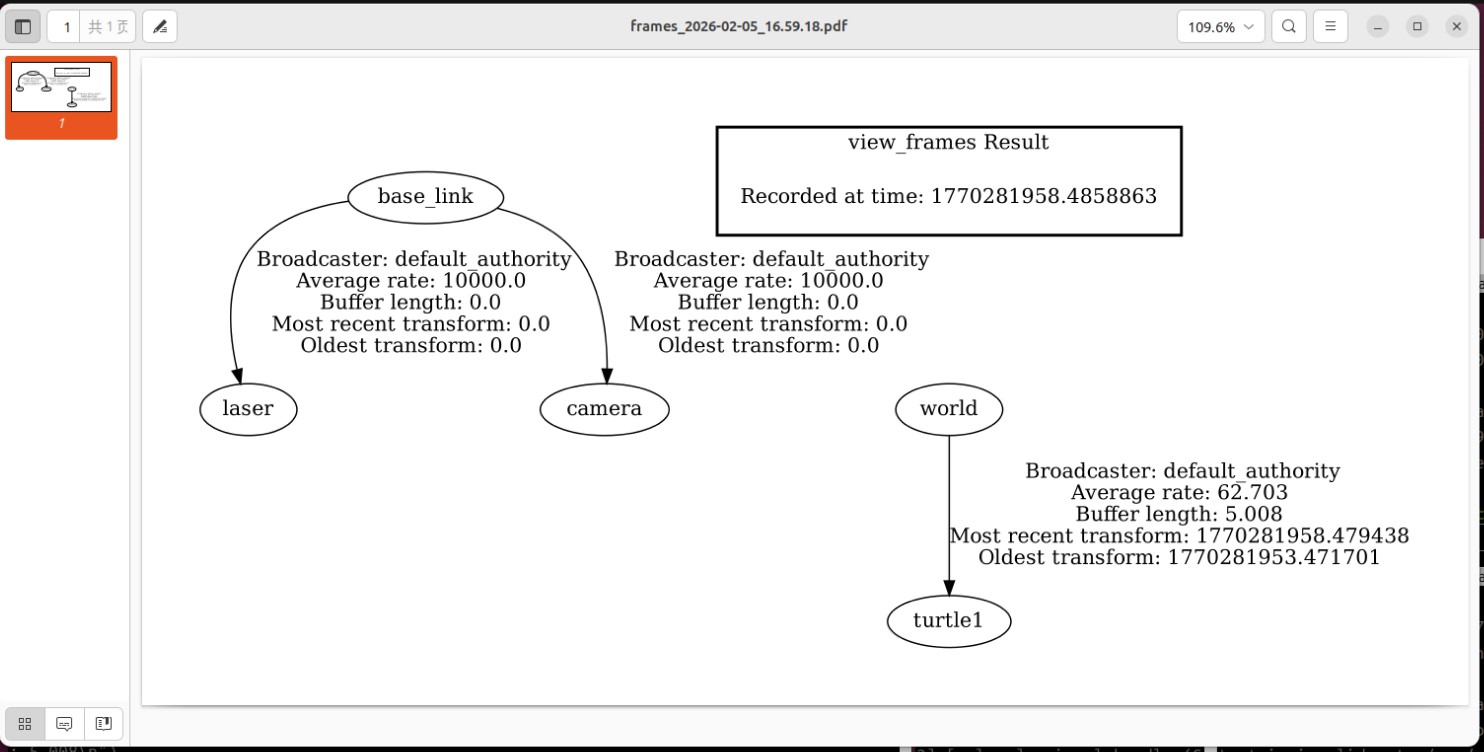
为了之后能够更直观的显示机器人系统中各个节点的相对状态关系,该方法会经常的被使用到。