ROS2-024-ROS2工具:坐标变换(五)坐标变换监听
简介
坐标变换监听 可以实现坐标点在不同坐标系之间的变换,或者不同的多个坐标系之间的变换。 针对坐标变换进行监听的前提,是必须已有不同的多个坐标系相对关系的广播,而至于是静态广播或动态广播则无要求。因为监听获取的坐标系相对关系皆为某一时刻或某一时间点。
案例梳理
以下有两个案例:
- 在前两章(ROS2-022-ROS2工具:坐标变换(三)坐标变换广播)的案例一中,我们发布了
laser相对于base_link,和camra相对于base_link的坐标系关系,请基于此求解laser相对于camera的坐标系关系。 - 在前一章(ROS2-023-ROS2工具:坐标变换(四)发布坐标点消息)的案例中,我们发布了
laser相对于base_link的坐标系关系 和laser坐标系下一 点状障碍物 的坐标点数据,请基于此求解在base_link坐标系下 该点状障碍物 的坐标。
在上述案例中,案例1是多坐标系的场景下实现不同坐标系之间的变换,案例2则是要实现同一坐标点在不同坐标系下的变换,虽然需求不同,但是相关算法都被封装好了,我们只需要调用相关 API 即可。
两个案例实现的流程类似,其主要步骤如下:
- 编写坐标变换程序实现;
- 编辑配置文件;
- 编译;
- 执行。
这两个案例我们会采用 C++ 和 Python 分别实现,二者都遵循上述实现流程。
准备工作
终端下进入工作空间的src目录,调用如下两条命令分别创建C++功能包和Python功能包。
ros2 pkg create cpp04_tf_listener --build-type ament_cmake --dependencies rclcpp tf2 tf2_ros geometry_msgs --node-name demo01_tf_listener
ros2 pkg create py04_tf_listener --build-type ament_python --dependencies rclpy tf_transformations tf2_ros geometry_msgs --node-name demo01_tf_listener_py案例一
Ⅰ.编写坐标变换程序实现
功能包 cpp04_tf_listener 的 src 目录下,编辑 C++ 文件 demo01_tf_listener.cpp,输入如下内容:
/*
需求: 在外部发布了“laser至base_link的坐标相对关系”与“camera至base_link的坐标相对关系” 后,
求解 “laser至camera的坐标相对关系”
步骤:
1. 包含头文件;
2. 初始化 ROS2 客户端
3. 自定义节点类:
3-1. 创建缓存对象(通过监听器保存订阅到的多个坐标系相对关系数据,并将其组合为一个坐标树)
3-2. 创建监听器(绑定缓存对象,会将所有的广播器所广播的数据写入缓存)
3-3. 编写定时器,循环实现转换
4. 调用spin函数,并传入节点对象指针
5. 释放资源。
*/
// 1. 包含头文件;
#include "rclcpp/rclcpp.hpp"
#include "tf2_ros/buffer.h"
#include "tf2_ros/transform_listener.h"
using namespace std::chrono_literals;
// 3. 自定义节点类:
class TFListener: public rclcpp::Node{
public:
TFListener() : Node("tf_listener_node_cpp"){
// 3-1. 创建缓存对象(通过监听器保存订阅到的多个坐标系相对关系数据,并将其组合为一个坐标树)
buffer_ = std::make_unique<tf2_ros::Buffer>(this->get_clock());
// 3-2. 创建监听器(绑定缓存对象,会将所有的广播器所广播的数据写入缓存)
listener_ = std::make_shared<tf2_ros::TransformListener>(*buffer_, this);
// 3-3. 编写定时器,循环实现转换
timer_ = this->create_wall_timer(1s, std::bind(&TFListener::on_timer, this));
}
private:
void on_timer(){
// 实现坐标系转换
// 当坐标系转换失败,会抛出异常,可使用 try-catch 处理
try
{
// geometry_msgs::msg::TransformStamped // 返回一个新的坐标帧
// lookupTransform( const std::string &target_frame, // 新坐标帧的父级坐标系
// const std::string &source_frame, // 新坐标帧的子级坐标系
// const tf2::TimePoint &time) // 转换的时间点,一般设置为最新时刻的坐标帧(即tf2::TimePointZero)
auto t = buffer_->lookupTransform("camera", "laser", tf2::TimePointZero);
RCLCPP_INFO(this->get_logger(), "----------转换完成的坐标帧信息----------");
RCLCPP_INFO(this->get_logger(), "新坐标帧:父级坐标系:%s, 子坐标系:%s, 偏移量 (%.2f, %.2f, %.2f)",
t.header.frame_id.c_str(), // camera
t.child_frame_id.c_str(), // laser
t.transform.translation.x, //x 轴偏移量
t.transform.translation.y, //y 轴偏移量
t.transform.translation.z //z 轴偏移量
);
}
catch(const tf2::LookupException& e)
{
RCLCPP_INFO(this->get_logger(), "异常提示: %s", e.what());
}
}
std::unique_ptr<tf2_ros::Buffer> buffer_;
std::shared_ptr<tf2_ros::TransformListener> listener_;
rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc, char *argv[])
{
// 2. 初始化 ROS2 客户端
rclcpp::init(argc, argv);
// 4. 调用spin函数,并传入节点对象指针。
rclcpp::spin(std::make_shared<TFListener>());
// 5.释放资源;
rclcpp::shutdown();
return 0;
}功能包 py04_tf_listener 的 py04_tf_listener 目录下,编辑 Python 文件 demo01_tf_listener_py.py,输入如下内容:
"""
需求: 在外部发布了“laser至base_link的坐标相对关系”与“camera至base_link的坐标相对关系” 后,
求解 “laser至camera的坐标相对关系”
流程:
1.导包;
2.初始化ROS2客户端;
3.自定义节点类;
3-1. 创建缓存对象(通过监听器保存订阅到的多个坐标系相对关系数据,并将其组合为一个坐标树)
3-2. 创建监听器(绑定缓存对象,会将所有的广播器所广播的数据写入缓存)
3-3. 编写定时器,循环实现转换
4.调用spin函数,并传入节点对象;
5.资源释放。
"""
# 1.导包;
import rclpy
from rclpy.node import Node
from tf2_ros.buffer import Buffer
from tf2_ros.transform_listener import TransformListener
from rclpy.time import Time
# 3.自定义节点类;
class TFListenerPy(Node):
def __init__(self):
super().__init__("tf_listener_py_node_py")
# 3-1. 创建缓存对象(通过监听器保存订阅到的多个坐标系相对关系数据,并将其组合为一个坐标树)
self.buffer_ = Buffer()
# 3-2. 创建监听器(绑定缓存对象,会将所有的广播器所广播的数据写入缓存)
self.listener_ = TransformListener(self.buffer_, self)
# 3-3. 编写定时器,循环实现转换
self.timer_ = self.create_timer(1.0, self.on_timer)
def on_timer(self):
# 判断是否可以进行坐标系转换
if self.buffer_.can_transform("camera", "laser", Time()):
# (method) def lookup_transform(
# target_frame: str, # 新坐标帧的父级坐标系
# source_frame: str, # 新坐标帧的子级坐标系
# time: Time, # 转换的时间点,一般设置为最新时刻的坐标帧
# timeout: Duration = Duration() # 使用默认值
# ) -> TransformStamped
t = self.buffer_.lookup_transform("camera", "laser", Time())
self.get_logger().info("----------转换完成的坐标帧信息----------")
self.get_logger().info(
"新坐标帧:父级坐标系:%s, 子坐标系:%s, 偏移量 (%.2f, %.2f, %.2f)"
%(t.header.frame_id, # camera
t.child_frame_id, # laser
t.transform.translation.x, # x 轴偏移量
t.transform.translation.y, # y 轴偏移量
t.transform.translation.z) # z 轴偏移量
)
else:
self.get_logger().info("转换失败XD")
def main():
# 2.初始化ROS2客户端;
rclpy.init()
# 4.调用spin函数,并传入节点对象;
rclpy.spin(TFListenerPy())
# 5.资源释放。
rclpy.shutdown()
if __name__ == '__main__':
main()提示信息
在 c++ 的例子里,如果在未发布 camera 或者 laser 坐标系相对于 base_link 坐标系的相对位置关系时就运行了该程序,就会出现以下信息:

该异常信息是我们当时编写代码时使用 try-catch 所抓取到的。关于该 excepetion 的相关描述为(以 c++ 为例):
class tf2::LookupException An exception class to notify of bad frame number This is an exception class to be thrown in the case that a frame not in the graph has been attempted to be accessed. The most common reason for this is that the frame is not being published, or a parent frame was not set correctly causing the tree to be broken. (当尝试访问图中不存在的帧时,将抛出此异常类。最常见的原因是该帧未被发布,或父帧设置不正确导致树结构断裂。)
其实针对该异常还有另一种处理方式,就是在转换之前先针对buffer进行判断,判断其是否可以进行转换。
以C++为例,在 buffer_ 下还有另一函数为 canTransform():
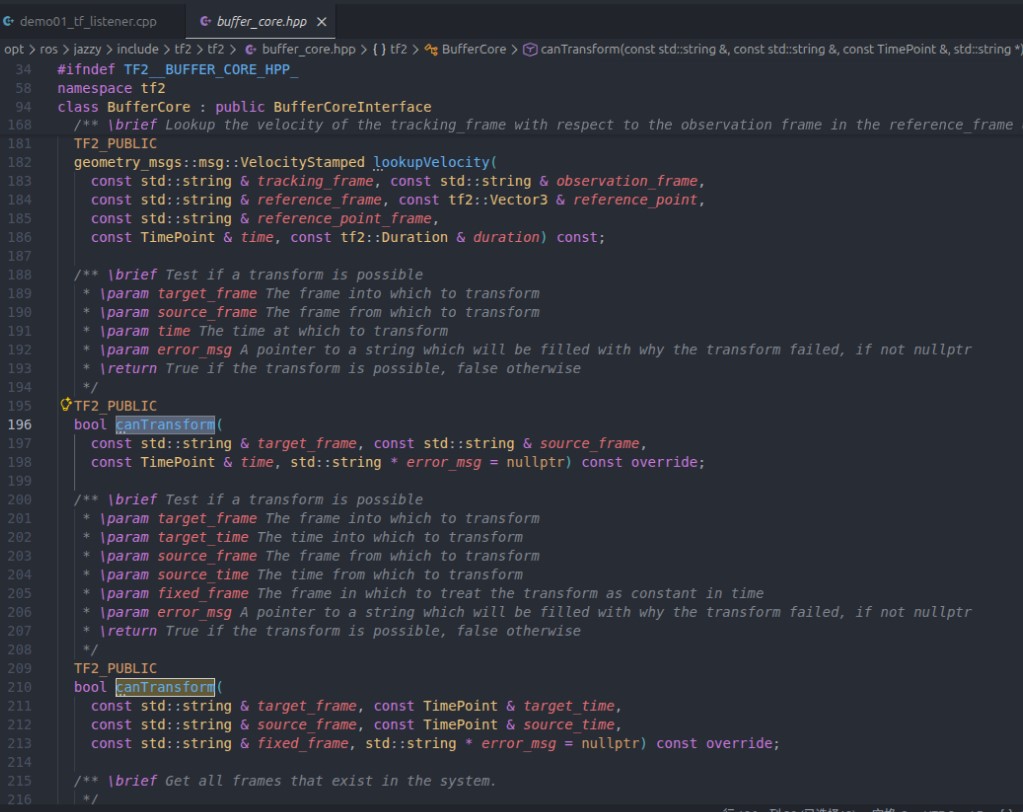
其返回一个 bool 值。因此你亦可以将之前的 try-catch 代码改写为类似于:
...
if (buffer_->canTransform("camera", "laser", tf2::TimePointZero)) {
auto t = buffer_->lookupTransform("camera", "laser", tf2::TimePointZero);
} else {
RCLCPP_INFO(this->get_logger(), "异常提示: 可能为坐标系位置关系未发布");
}你可以参考 python 那边在针对上述异常时的处理方法。
Ⅱ.编辑配置文件
在 CMakeLists.txt 中发布和订阅程序核心配置如下:
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tf2 REQUIRED)
find_package(tf2_ros REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(turtlesim REQUIRED)
add_executable(demo01_tf_listener src/demo01_tf_listener.cpp)
ament_target_dependencies(
demo01_tf_listener
"rclcpp"
"tf2"
"tf2_ros"
"geometry_msgs"
"turtlesim"
)
install(TARGETS demo01_tf_listener
DESTINATION lib/${PROJECT_NAME})在 setup.py 中针对 entry_points 字段的 console_scripts 添加如下内容:
...
entry_points={
'console_scripts': [
'demo01_tf_listener_py = py03_tf_broadcaster.demo01_tf_listener_py:main'
],
},
...Ⅲ.编译
终端中进入当前工作空间,编译功能包:
colcon build --packages-select cpp04_tf_listenercolcon build --packages-select py04_tf_listenerⅣ.运行
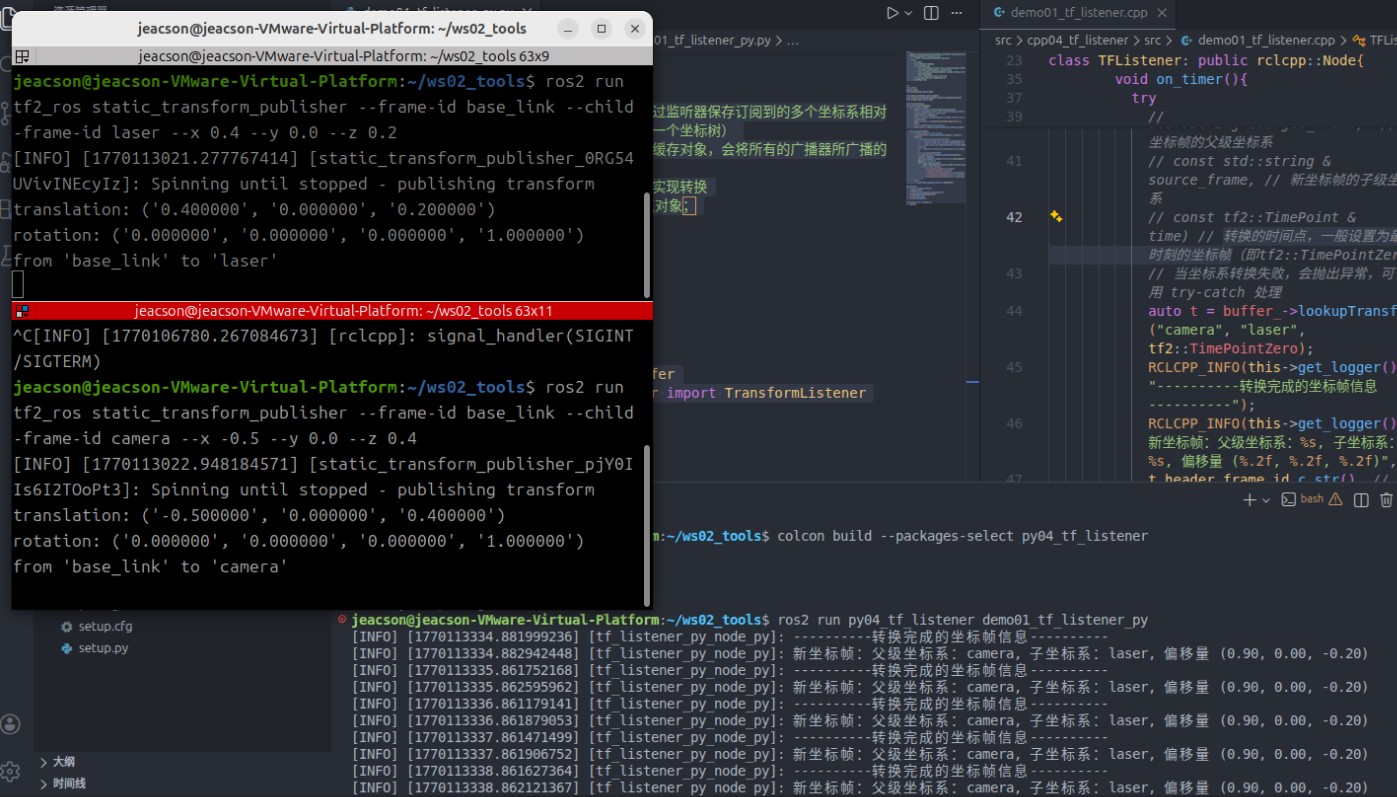
当前工作空间下,启动两个终端,终端1输入如下命令发布雷达(laser)相对于底盘(base_link)的静态坐标变换(使用坐标变换(三)章节所使用的命令方式发布):
. install/setup.bash
ros2 run tf2_ros static_transform_publisher --frame-id base_link --child-frame-id laser --x 0.4 --y 0.0 --z 0.2终端2输入如下命令发布摄像头(camera)相对于底盘(base_link)的静态坐标变换(同样使用坐标变换(三)章节所使用的命令方式发布):
. install/setup.bash
ros2 run tf2_ros static_transform_publisher --frame-id base_link --child-frame-id camera --x -0.5 --y 0.0 --z 0.4新建一终端3,输入如下命令运行代码:
. install/setup.bash
ros2 run cpp04_tf_listener demo01_tf_listener在该终端中便会输出如下信息:
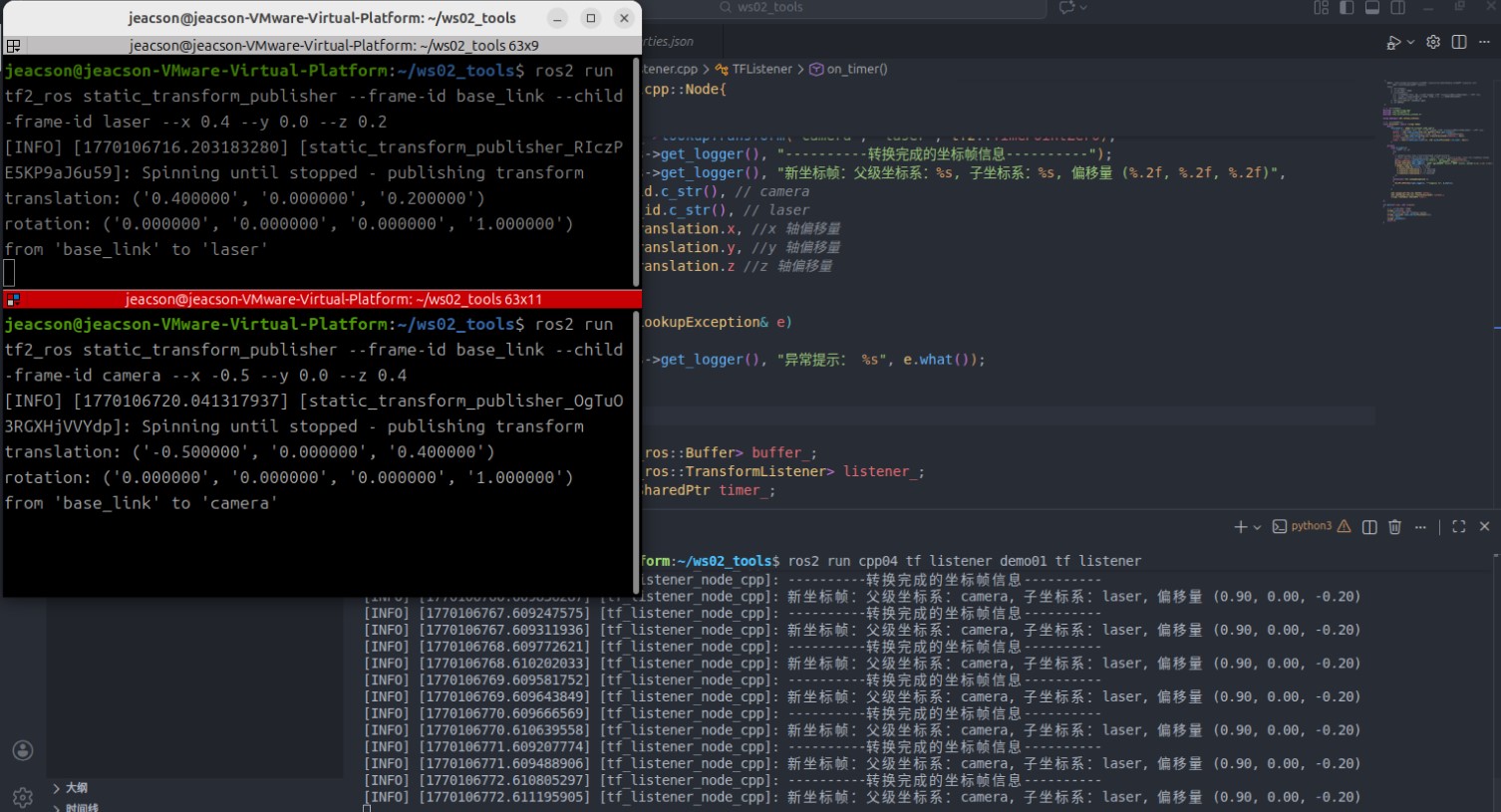
. install/setup.bash
ros2 run py04_tf_listener demo01_tf_listener_py在该终端中便会输出如下信息:
案例二
见下一章节