ROS2-019-ROS2工具:rosbag2
简介
假设你有一个机器人:
- 它在日常运行时没有问题,但是在某一次运行时突然报错了。你希望即刻对此进行排查,但是这个报错只出现了一次,再次运行又没有报错了。
- 你给他重新设计了一个运动控制节点,但是调不准它的一些特定参数。如果在真实环境中直接运行可能会出现意想不到的情况。
- 你在某一次运动导航实验中意外的获得了一条导航路径,希望有什么工具把它保存下来,以便之后复现该结果。
针对数据的留存及其读取实现,ROS2 提供了专门的工具 —— rosbag2
概念与作用
rosbag2 是用于录制与回放 ROS2 系统中节点间通信数据的 核心工具套件。简单来说,它类似于一个专门针对机器人系统的“数据记录仪”和“数据播放器”。我们将在虚拟机中进行运用。
使用方法
0. 前置工作
先创建功能包:
ros2 pkg create cpp02_rosbag --build-type ament_cmake --dependencies rclcpp rosbag2_cpp geometry_msgs --node-name demo01_writerros2 pkg create py02_rosbag --build-type ament_python --dependencies rclpy rosbag2_py geometry_msgs --node-name demo01_writer_py1.命令行工具的简单使用语法
在终端中,你可以使用 ros2 bag 命令工具以实现数据的录制回放工作。其基本使用语法如下:
burst 精确控制回放过程
convert 给定一个 bag 文件,写出一个新的具有不同配置的 bag 文件;
info 输出 bag 文件的相关信息;
list 输出可用的插件信息;
play 回放 bag 文件数据;
record 录制 bag 文件数据;
reindex 重建 bag 的元数据文件。你可以通过 --help 后缀查看其帮助文档,当然以下亦会通过一个案例进行介绍。
案例
假设已在两个独立终端内,分别启动了一个 turtlesim_node 节点与一个 键盘控制 节点:
ros2 run turtlesim turtlesim_noderos2 run turtlesim turtle_teleop_key要求在运动过程中将键盘经由 turtle_teleop_key 所输入的速度、转向指令等通过 ros2 bag 工具写入到上述文件夹路径内,使得 turtlesim_node 节点可以通过读取该文件夹内特定文件复现移动路径。
操作
1. 先录制
再原有基础上再次新建一个终端C,新建一个文件夹用于存储 bag:
cd
mkdir ros2_bag移动到该文件夹下后,使用 ros2 bag record 先开启指令的录制:
cd ros2_bag/
ros2 bag record /turtle1/cmd_vel -o bag_cmd_velrecord 的相关语法
在上述代码中:
ros2 bag record /turtle1/cmd_vel -o bag_cmd_vel
# ↑ ↑ ↑ ↑
#设置参数为 record \ \ /
# 设置需要录制的 topic↗ / \
# 指定输出 (与下配对) ---------↗ /
# 指定输出路径&名字 (与上配对,不写则默认输出带时间戳文件名至 bash 运行路径)你可以通过 --help 后缀查看其详细文档,在这里仅对作简单介绍。
在 终端B 内可以 通过键盘 操控小海龟,此时ros2 bag 就会将小海龟此时的运行速率与方向记录下来。

之后你就可以在 终端C 内通过 ctrl+c 结束录制了。
一定只使用方向键操控小海龟!
当你希望在 终端B 内通过键盘操控小海龟时,会看到下面这一条消息:
...
Use g|b|v|c|d|e|r|t keys to rotate to absolute orientations.
...她告诉你说可以使用这些 key 对小海龟进行绝对角度旋转。但是请 注意,不要使用 这些 key 直接旋转小海龟!
因为使用 g|b|v|c|d|e|r|t 等 key 对小海龟进行绝对角度旋转是调用的 /turtle1/teleport_absolute 服务 ,除非特殊设置,否则是无法记录小海龟旋转的。
在录制结束后,你会在 ~/ros2_bag 文件夹下看到生成一新文件夹:
在该文件夹下会生成两个文件:

其中:
metadata.yaml文件为一个源文件,存储了我们所录制的bag的一些源信息bag_cmd_vel_0.mcap文件是一个为 机器人数据记录 而设计的开源二进制容器格式文件,其与原有的使用了.db3格式的数据库文件相比,在并发和流式处理上更有优势。如果依然需要使用
.db3格式的数据库文件如果某些下游工具暂不支持
.mcap,或在特定场景依然需要.db3,可以通过参数指定:ros2 bag record /turtle1/cmd_vel --storage sqlite3
之后我们就可以使用这两个文件进行回放了。
2. 后回放
在 终端A 内先将原有运行的 node 节点关闭,后重启该节点。
在 终端A 内节点保持开启的前提下,新建另一终端D,然后输入:
ros2 bag play bag_cmd_velplay 的相关语法
play 代码比较简洁,在上述代码中:
ros2 bag play bag_cmd_vel
# ↑ ↑
#设置参数为 play /
# 指定输入路径&名字 ↗你可以通过 --help 后缀查看其详细文档,在这里仅对作简单介绍。
此时ros2 bag 指令就会将小海龟当时被记录的运行速率与方向重新发送给小海龟,令其绘制下来:

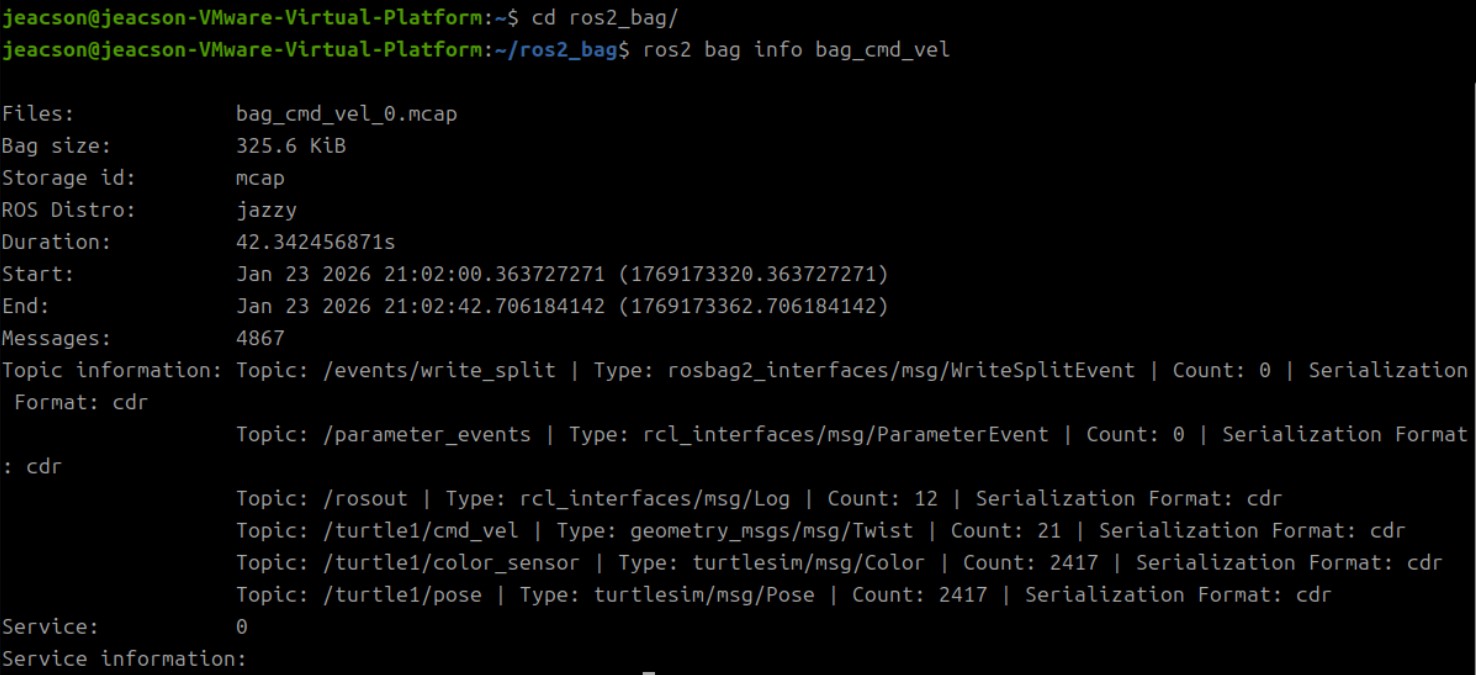
如果你希望查看特定 bag 的相关信息,你可以在 bag 的路径下使用以下指令:
ros2 bag info bag_cmd_vel这样你就可以获取到包括其 对应版本、 录制长度、存储大小 的相关信息了:
2. 经由编程使用 rosbag2 的相关语法
在有些情况下,我们也需要以编程的方式使用 rosbag2 ,以下亦会通过案例对其进行讲解:
假设有一文件夹路径为 ~/ros2_bag 可用于 bag 存储。要求启动一个 turtlesim_node 节点与一个 键盘控制 节点:
ros2 run turtlesim turtlesim_noderos2 run turtlesim turtle_teleop_key要求在运动过程中将输入的速度、转向指令等通过 ros2 bag 写入到上述文件夹路径内,使得重启 turtlesim_node 节点后可以通过读取该文件夹内特定文件复现移动路径。
①. 序列化(录制)
序列化,实际上就是录制 bag 文件。其核心实现一共有三步骤:
- 创建写出对象 (指针)
- 设置写出的目标文件路径
- 写出消息
在创建的 demo01_writer.cpp 文件中,写入如下代码:
/*
需求: 录制乌龟运动的速度指令
步骤:
1. 包含头文件;
2. 初始化 ROS2 客户端
3. 自定义节点类:
3-1. 创建一个录制对象
3-2. 设置磁盘文件
3-3. 写入数据(创建速度订阅方,回调函数中执行写入操作)
4. 调用spin函数,并传入节点对象指针
5. 释放资源。
*/
// 1. 包含头文件;
#include "rclcpp/rclcpp.hpp"
#include "geometry_msgs/msg/twist.hpp"
#include "rosbag2_cpp/writer.hpp"
// 3. 自定义节点类:
class SimpleBagRecorder: public rclcpp::Node{
public:
SimpleBagRecorder() : Node("simple_bag_recorder_node_cpp"){
RCLCPP_INFO(this->get_logger(), "消息录制对象已创建");
// 3-1. 创建一个录制对象
writer_ = std::make_unique<rosbag2_cpp::Writer>();
// 3-2. 设置磁盘文件
writer_->open("my_bag"); // --该路径是相对路径,是工作空间的直接子级
// 3-3. 写入数据(创建速度订阅方,回调函数中执行写入操作)
// writer_->write()
sub_ = this->create_subscription<geometry_msgs::msg::Twist>("/turtle1/cmd_vel", 10, std::bind(&SimpleBagRecorder::do_write_msg, this, std::placeholders::_1));
}
private:
void do_write_msg(std::shared_ptr<rclcpp::SerializedMessage> msg){
// write(std::shared_ptr<rclcpp::SerializedMessage> message, // 被写出的消息
// const std::string &topic_name, // 话题名称
// const std::string &type_name, // 被写出的消息类型
// const rclcpp::Time &time) // 时间戳
RCLCPP_INFO(this->get_logger(), "数据写出中。。。");
writer_->write(msg, "/turtle1/cmd_vel", "geometry_msgs/msg/Twist", this->now());
}
std::unique_ptr<rosbag2_cpp::Writer> writer_;
// 要求指针只对应一个对象,一旦指针被销毁,对象需要马上被释放。
// 以避免该“需要操作磁盘文件”对象出现内存泄漏情况
rclcpp::Subscription<geometry_msgs::msg::Twist>::SharedPtr sub_;
};
int main(int argc, char *argv[])
{
// 2. 初始化 ROS2 客户端
rclcpp::init(argc, argv);
// 4. 调用spin函数,并传入节点对象指针。
rclcpp::spin(std::make_shared<SimpleBagRecorder>());
// 5.释放资源;
rclcpp::shutdown();
return 0;
}在创建的 demo01_writer_py.py 文件中,写入如下代码:
"""
需求:录制 turtle_teleop_key 节点发布的速度指令。
步骤:
1.导包;
2.初始化 ROS 客户端;
3.定义节点类;
3-1.创建写出对象;
3-2.设置写出的目标文件、话题等参数;
3-3.写出消息。
4.调用 spin 函数,并传入对象;
5.释放资源。
"""
# 1.导包;
import rclpy
from rclpy.node import Node
from rclpy.serialization import serialize_message
from geometry_msgs.msg import Twist
import rosbag2_py
from rclpy.logging import get_logger
# 3.定义节点类;
class SimpleBagRecorder(Node):
def __init__(self):
super().__init__('simple_bag_recorder_py')
# 3-1.创建写出对象;
self.writer = rosbag2_py.SequentialWriter()
# 3-2.设置写出的目标文件、话题等参数;
storage_options = rosbag2_py.StorageOptions(
uri='my_bag_py',
storage_id='mcap')
converter_options = rosbag2_py.ConverterOptions('', '')
self.writer.open(storage_options, converter_options)
topic_info = rosbag2_py.TopicMetadata(
id=0,
name='/turtle1/cmd_vel',
type='geometry_msgs/msg/Twist',
serialization_format='cdr')
self.writer.create_topic(topic_info)
self.get_logger().info("bag已创建,建立订阅中。。。")
self.subscription = self.create_subscription(
Twist,
'/turtle1/cmd_vel',
self.topic_callback,
10)
self.subscription
def topic_callback(self, msg):
self.get_logger().info("节点消息被接收!")
# 3-3.写出消息。
self.writer.write(
'/turtle1/cmd_vel',
serialize_message(msg),
self.get_clock().now().nanoseconds)
def main(args=None):
# 2.初始化 ROS 客户端;
rclpy.init(args=args)
# 4.调用 spin 函数,并传入对象;
sbr = SimpleBagRecorder()
rclpy.spin(sbr)
# 5.释放资源。
rclpy.shutdown()
if __name__ == '__main__':
main()②. 反序列化(读取)
反序列化,实际上就是读取 bag 文件。其核心实现一共有四步骤:
- 创建读取对象指针
- 设置读取的目标文件
- 读取消息
- 关闭文件
在创建的 demo02_readter.cpp 文件中,写入如下代码:
/*
需求: 读取 bag 文件的数据,并将数据输出之终端
步骤:
1. 包含头文件;
2. 初始化 ROS2 客户端
3. 自定义节点类:
3.1 创建一个回放对象;
3.2 设置被读取的文件;
3.3 读取消息;
3.4 关闭文件。
4. 调用spin函数,并传入节点对象指针
5. 释放资源。
*/
// 1. 包含头文件;
#include "rclcpp/rclcpp.hpp"
#include "rosbag2_cpp/reader.hpp"
#include "geometry_msgs/msg/twist.hpp"
// 3. 自定义节点类:
class SimpleBagPlay: public rclcpp::Node{
public:
SimpleBagPlay() : Node("simple_bag_rplay_node_cpp"){
RCLCPP_INFO(this->get_logger(), "消息回放对象已创建");
int counter = 0;
// 3.1 创建一个回放对象;
reader_ = std::make_unique<rosbag2_cpp::Reader>();
// 3.2 设置被读取的文件;
reader_->open("my_bag");
// 3.3 循环读取消息;
while (reader_->has_next())
{
auto twist = reader_->read_next<geometry_msgs::msg::Twist>();
RCLCPP_INFO(this->get_logger(), "线速度: %.2f, 角速度: %.2f", twist.linear.x, twist.angular.z);
counter++;
}
// 3.4 关闭文件。
reader_->close();
RCLCPP_INFO(this->get_logger(), "总消息数量: %d", counter);
}
private:
std::unique_ptr<rosbag2_cpp::Reader> reader_;
};
int main(int argc, char *argv[])
{
// 2. 初始化 ROS2 客户端
rclcpp::init(argc, argv);
// 4. 调用spin函数,并传入节点对象指针。
rclcpp::spin(std::make_shared<SimpleBagPlay>());
// 5.释放资源;
rclcpp::shutdown();
return 0;
}在创建的 demo02_readter_py.py 文件中,写入如下代码:
"""
需求:读取 bag 文件数据。
步骤:
1.导包;
2.初始化 ROS 客户端;
3.定义节点类;
3-1.创建读取对象;
3-2.设置读取的目标文件、话题等参数;
3-3.读消息;
3-4.关闭文件。
4.调用 spin 函数,并传入对象;
5.释放资源。
"""
# 1.导包;
import rclpy
from rclpy.node import Node
import rosbag2_py
from rclpy.logging import get_logger
# 3.定义节点类;
class SimpleBagPlayer(Node):
def __init__(self):
super().__init__('simple_bag_player_py')
# 3-1.创建读取对象;
self.reader = rosbag2_py.SequentialReader()
# 3-2.设置读取的目标文件、话题等参数;
storage_options = rosbag2_py.StorageOptions(
uri="my_bag_py",
storage_id='mcap')
converter_options = rosbag2_py.ConverterOptions('', '')
self.reader.open(storage_options,converter_options)
def read(self):
# 3-3.读消息;
while self.reader.has_next():
msg = self.reader.read_next()
get_logger("rclpy").info("topic = %s, time = %d, value=%s" % (msg[0], msg[2], msg[1]))
def main(args=None):
# 2.初始化 ROS 客户端;
rclpy.init(args=args)
# 4.调用 spin 函数,并传入对象;
reader = SimpleBagPlayer()
reader.read()
rclpy.spin(reader)
# 5.释放资源。
rclpy.shutdown()
if __name__ == '__main__':
main()③. 编辑配置文件
修改 cpp02_rosbag 包内的 CMakeLists.txt:
...
add_executable(demo01_writer src/demo01_writer.cpp)
add_executable(demo02_reader src/demo02_reader.cpp)
target_include_directories(demo01_writer PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include/${PROJECT_NAME}>)
target_include_directories(demo02_reader PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include/${PROJECT_NAME}>)
target_compile_features(demo01_writer PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17
target_compile_features(demo02_reader PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17
ament_target_dependencies(
demo01_writer
"rclcpp"
"rosbag2_cpp"
"geometry_msgs"
)
ament_target_dependencies(
demo02_reader
"rclcpp"
"rosbag2_cpp"
"geometry_msgs"
)
install(TARGETS demo01_writer demo02_reader
DESTINATION lib/${PROJECT_NAME})
...修改 py02_rosbag 包内的 setup.py:
...
entry_points={
'console_scripts': [
'demo01_writer_py = py02_rosbag.demo01_writer_py:main',
'demo02_reader_py = py02_rosbag.demo02_reader_py:main'
],
},④. 编译
使用 colcon build --packages-select cpp02_rosbag 进行编译即可。
使用 colcon build --packages-select py02_rosbag 进行编译即可。
⑤. 执行
在 终端A 与 终端B 内分别启动一个 turtlesim_node 节点与一个 键盘控制 节点后,运行代码:
ros2 run cpp02_rosbag demo01_writerros2 run py02_rosbag demo01_writer_py在 终端B 内 通过键盘 操控小海龟时,此时所执行的代码 就会将小海龟此时的运行速率与方向记录下来。
之后你就可以在 终端C 内通过 ctrl+c 结束录制了。
")
在 终端A 内先将原有运行的 node 节点关闭,后重启该节点。
在 终端A 内节点保持开启的前提下,新建另一 终端D,然后输入:
ros2 run cpp02_rosbag demo02_readerros2 run py02_rosbag demo02_reader_py此时 终端D 内就会将对应 bag 内的相关数据信息按照代码内设计输出至终端。


若需要记录来自节点自己的的合成数据
上述的代码仅仅对 “创建一个单纯用于保存 topic 数据及其处理结果” 的通常设置做了简单介绍,其关联的信息是通过特定 topic 内部的计时器进行时间戳的记录的。如果你需要在节点中通过 “自己创建计时器” 以使用 rosbag2 的相关 API,你可以参考 官网提供的 C++ 实现方法 与 Python 实现方法。他们 通过 rclcpp::Node::create_wall_timer() 和 rclpy.node.create_timer() 函数,创建了一个 可以使用回调函数 的计时器。