ROS2-007-通信机制:参数服务-分支贰:Python实现
动作通信的Python实现
现在,我们通过针对以下案例需求进行 Python 的实现,以更加深入了解参数服务。
案例需求&案例分析
需求:有两个节点,请编写参数服务,在参数服务端(节点A)中设置一些参数,使参数客户端(节点B)可以通过访问参数服务端(节点A)对这些参数实现查看与修改,并且参数服务端(节点A)自身可以对此进行增删改查。
分析:在上述需求中,我们需要关注以下三个要素:
- 参数服务端;
- 参数客户端;
- 参数本身。
流程简介
案例实现前需要先了解ROS2中参数的相关API,无论是客户端还是服务端都会使用到参数,而参数服务案例实现主要步骤如下:
- 编写参数服务端实现;
- 编写参数客户端实现;
- 编辑配置文件;
- 编译;
- 执行。
准备工作
参考前文
参数服务的 Python 实现
1. 编写服务端实现
功能包 py04_parameter 的 py04_parameter 目录下,新建 Python 文件 demo01_parameter_server_py.py,并编辑文件,输入如下内容:
"""
需求:编写参数服务端,设置并操作参数。
步骤:
1.导包;
2. 初始化 ROS2 客户端
3. 自定义节点类:
3-1. 声明参数
3-2. 查询参数
3-3. 修改参数
3-4. 删除参数
4. 调用spin函数,并传入节点对象指针;
5. 释放资源。
"""
# 1.导包;
import rclpy
from rclpy.node import Node
# 3.定义节点类;
class MyParamServer(Node):
def __init__(self):
# 为了使用 undeclared Parameter, 需要将
# allow_undeclared_parameters = True
super().__init__('my_param_server_node_py',
allow_undeclared_parameters=True)
self.get_logger().info("参数服务端已创建!")
# 3-1. 声明参数
def declare_param(self):
# 声明参数并设置默认值
self.declare_parameter("car_type", "Tiger")
self.declare_parameter("height", 1.50)
self.declare_parameter("wheels", 4)
# 以下是 undeclared Parameter。
self.p1 = rclpy.Parameter("undcl_test", value = "Testing")
# 如果你希望提供其类型,可以使用 “type_” 变量。
# 其介于 “name” 和 “value” 之间。 例如:
# self.p1 = rclpy.Parameter("undcl_test", type_ = Parameter.Type.STRING, value = "Testing")
# 注意:此需要 “from rclpy.parameter import Parameter”
self.set_parameters([self.p1])
# 3-2. 查询参数
def get_param(self):
self.get_logger().info("*------查询------*")
# 1. 获取指定参数
car_type = self.get_parameter("car_type")
self.get_logger().info("%s = %s" % (car_type.name, car_type.value))
# 2. 判断是否包含指定 Parameters
self.get_logger().info("是否包含car_type? %d", self.has_parameter("car_type"))
self.get_logger().info("是否包含car_hype? %d", self.has_parameter("car_hype"))
# 3. 获取所有参数
params = self.get_parameters(["car_type", "height", "wheels"])
self.get_logger().info("*---解析所有参数---*")
for param in params:
self.get_logger().info("%s ---> %s" % (param.name, param.value))
# 3-3. 修改参数
def update_params(self):
self.get_logger().info("*------修改------*")
param_BEFORE = self.get_parameter("car_type")
self.get_logger().info("修改前:car_type = %s" % param_BEFORE.value)
self.set_parameters([rclpy.Parameter("car_type", value = "Horse")])
param_AFTER = self.get_parameter("car_type")
self.get_logger().info("修改后:car_type = %s" % param_AFTER.value)
# 3-4. 删除参数
def del_param(self):
self.get_logger().info("*------删除------*")
self.get_logger().info("删除前:undcl_test存在吗? %d" % self.has_parameter("undcl_test"))
self.undeclare_parameter("undcl_test")
self.get_logger().info("删除后:undcl_test存在吗? %d" % self.has_parameter("undcl_test"))
def main(args=None):
# 2.初始化 ROS2 客户端;
rclpy.init(args=args)
# 4.调用spin函数,并传入节点对象;
param_server = MyParamServer()
param_server.declare_param()
param_server.get_param()
param_server.update_params()
param_server.del_param()
rclpy.spin(param_server)
# 5.释放资源。
rclpy.shutdown()
if __name__ == '__main__':
main()编写完服务端之后,我们可以使用前文所述的相应方法在命令行窗口对其进行调试,测试其是否可以使用。
例如在该工作空间内编译完功能包后,开启该服务端:
colcon build --packages-select py04_parameter
. install/setup.bash
ros2 run py04_parameter demo01_parameter_server_py新建另一个终端,cd进入该工作空间后便可以使用以下代码进行 height 的查询操作:
. install/setup.bash
ros2 param get /my_param_server_node_py height关于删除,这里比较奇怪
在 C++ 中,如果你想要删除一个 Parameter,首先这个 Parameter 必须得是 Undeclared Parameter;但是在 Python 中,好像不需要必须得是 Undeclared Parameter 就可以被删除。即使在节点被创建时,不使用“allow_undeclared_parameters=True”,也可以删除指定的 Parameter。只能说有待更深入的源码研究。
2. 编写客户端实现(并不)
well,actually☝🤓
ROS2 的 Python 客户端暂时还没有提供参数客户端专用的 API (也可能是我没找着), 但是参数服务的底层是基于服务通信的,所以在这里我们通过 服务通信(Services) 操作参数服务端的参数。你可以只看看就可以,不一定实操。
功能包 py04_parameter 的 py04_parameter 目录下,新建 Python 文件 demo02_parameter_client_py.py ,并编辑文件,输入如下内容:
# 1.导包;
import sys
import rclpy
from rclpy.node import Node
from rcl_interfaces.srv import ListParameters
from rcl_interfaces.srv import GetParameters
from rcl_interfaces.srv import SetParameters
from rcl_interfaces.msg import ParameterType
from rcl_interfaces.msg import Parameter
from rcl_interfaces.msg import ParameterValue
# 3.自定义节点类;
class MyParamClient(Node):
def __init__(self):
super().__init__("my_param_client_node_py")
def list_params(self):
# 3-1.创建客户端;
self.cli_list = self.create_client(ListParameters, "/my_param_server_node_py/list_parameters")
self.get_logger().info("参数客户端已创建!")
# 3-2. 等待服务连接。
while not self.cli_list.wait_for_service(timeout_sec = 1.0):
self.get_logger().info("列出参数服务连接中,请稍后。。。")
self.req = ListParameters.Request()
self.future = self.cli_list.call_async(self.req)
rclpy.spin_until_future_complete(self, self.future)
return self.future.result()
def get_params(self, names):
# 3-1.创建客户端;
self.cli_get = self.create_client(GetParameters, "/my_param_server_node_py/get_parameters")
self.get_logger().info("动作客户端已创建!")
# 3-2. 等待服务连接。
while not self.cli_get.wait_for_service(timeout_sec = 1.0):
self.get_logger().info("列出参数服务连接中,请稍后。。。")
self.req = GetParameters.Request()
self.req.names = names
self.future = self.cli_get.call_async(self.req)
rclpy.spin_until_future_complete(self, self.future)
return self.future.result()
def set_params(self):
# 3-1.创建客户端;
self.cli_set = self.create_client(SetParameters, "/my_param_server_node_py/set_parameters")
self.get_logger().info("动作客户端已创建!")
# 3-2. 等待服务连接。
while not self.cli_set.wait_for_service(timeout_sec = 1.0):
self.get_logger().info("列出参数服务连接中,请稍后。。。")
self.req = SetParameters.Request()
self.p1 = Parameter()
self.p1.name = "car_type"
self.v1 = ParameterValue()
self.v1.type = ParameterType.PARAMETER_STRING
self.v1.string_value = "Rat"
self.p1.value = self.v1
self.p2 = Parameter()
self.p2.name = "height"
self.v2 = ParameterValue()
self.v2.type = ParameterType.PARAMETER_DOUBLE
self.v2.double_value = 0.3
self.p2.value = self.v2
self.req.parameters = [self.p1, self.p2]
self.future = self.cli_set.call_async(self.req)
rclpy.spin_until_future_complete(self, self.future)
return self.future.result()
def main():
# 2. 初始化 ROS2 客户端;
rclpy.init();
# 4. 创建对象并调用其功能;
client = MyParamClient();
# 获取参数列表
client.get_logger().info("------获取参数列表------");
response = client.list_params();
for name in response.result.names:
client.get_logger().info(name)
client.get_logger().info("------获取参数------")
response = client.get_params(["height", "car_type"])
values = response.values
for value in values:
if value.type == ParameterType.PARAMETER_STRING:
client.get_logger().info("字符串值:%s" % value.string_value)
elif value.type == ParameterType.PARAMETER_DOUBLE:
client.get_logger().info("浮点值:%.2f" % value.double_value)
client.get_logger().info("------设置参数------")
response = client.set_params()
results = response.results
client.get_logger().info("设置了%d个参数" % len(results))
for result in results:
if not result.successful:
client.get_logger().info("设置参数失败")
# 5. 释放资源;
rclpy.shutdown()
if __name__ == '__main__':
main()well,WELL actually☝🤓
这本质上只是一个代替参数客户端的测试用程序,你不一定非要照着这个来做相关的操作,指不定什么时候 API 就更新了,所以你可以就看看(主要是我没尝试出来)。
3. 编辑配置文件
在 Python 功能包中,配置文件需要关注 package.xml 与 setup.py 。如果是自建的文件,需要针对各个文件进行附加配置。
Ⅰ. package.xml
在创建功能包时,所依赖的功能包已经自动配置了,配置内容如下:
<!-- package.xml -->
<depend>rclpy</depend>
<depend>base_interfaces_demo</depend>需要说明的是:
- 如果自建的节点有新引入相关功能包,需要针对各个节点文件进行功能包的附加配置。
Ⅱ. setup.py
setup.py中发布和订阅程序核心配置如下:
......
setup(
......
entry_points={
'console_scripts': [
'demo01_parameter_server_py = py04_parameter.demo01_parameter_server_py:main',
'demo02_parameter_client_py = py04_parameter.demo02_parameter_client_py:main',
],
},
)需要说明的是:如果有自建的节点被新引入,则需要针对各个节点文件进行以下操作:
自建的节点需要附加配置
console_scripts配置项, 为编译器提供可执行程序位置,格式为:- '节点名 = 节点所在包名.节点名:main'
一般直接将原本程序生成的代码复制下来进行修改即可,因此这里的‘节点所在包名’都相同。
4. 编译
终端中进入当前工作空间,编译功能包:
colcon build --packages-select py04_parameter5. 执行
当前工作空间下,分别启动两个终端,先在终端1执行服务端,然后在终端2执行客户端。
终端1输入如下指令:
. install/setup.bash
ros2 run py04_parameter demo01_parameter_server_py终端2输入如下指令:
. install/setup.bash
ros2 run py04_parameter demo02_parameter_client_py最终运行结果应与下图类似。
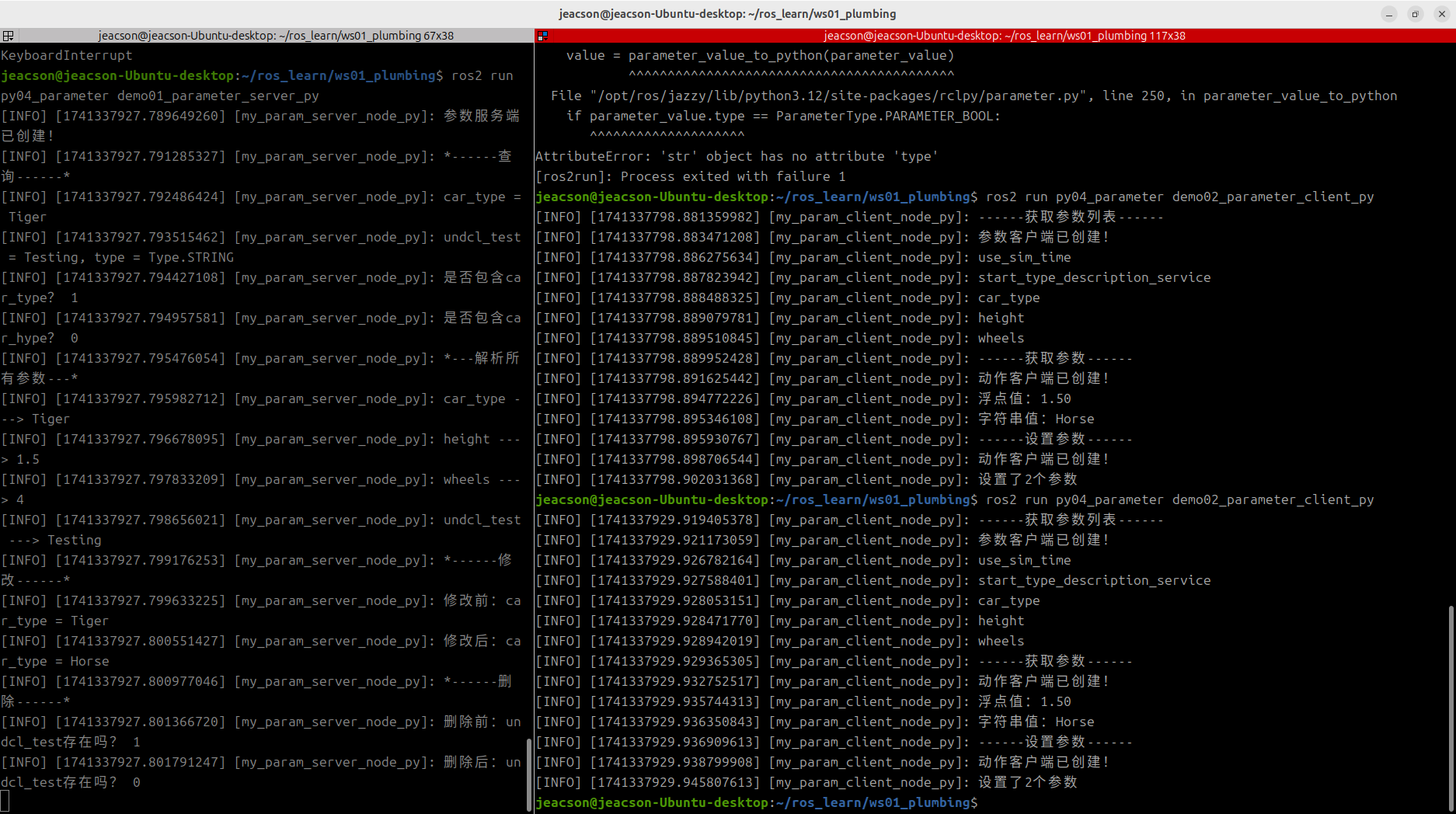
必须要先开启服务端
与服务通信同理,在进行参数服务时必须保证参数客户端(?)能够正常连接到参数服务端,才能够使得参数客户端(?)在发送请求时相关数据不会丢失。因此必须先开启参数服务端,再开启参数客户端(?)。
总结
在本小节中,我们尝试使用 Python 实现了 参数服务。在这之后你可以尝试 使用 C++ 实现参数服务,或者你可以回到 ROS2-007-通信机制:参数服务 以查看本节的总结。